
Aerosonde
This Remotely Piloted Vehicle may be a big advance in meteorological data collection, and have other important applications.
Rick Allison
Background
Weather affects nearly every human activity. Accurate forecasting is vital for economic activity, travel safety, and even historical events. For decades the radiosonde (a balloon-borne wireless sensor) has been a cornerstone of atmospheric observation. Despite advances in radar, satellites, and computer modeling, radiosondes remain indispensable because nothing has fully replaced their role in providing direct, local data.
Computer weather models demand high-density raw data. Satellite coverage is broad but often lacks local detail, and radiosondes cannot be launched everywhere or provide continuous coverage. Full-sized aircraft are either too risky or too expensive for many missions. A small, relatively inexpensive Remotely Piloted Vehicle (RPV) called the Aerosonde, developed by the Insitu Group, promises to help fill that gap.
Availability of commercial GPS receivers and advances in model-aircraft radio-control technology have made the Aerosonde technically and financially feasible. Modelers and the hobby industry played an important role: the airframe, powerplant, and parts of the flight-control system rely on off-the-shelf or modified RC components.
Design and construction
- Airframe: Based around a nearly box-stock 900-square-inch Genesis thermal-duration glider wing (Selig 7037 airfoil) from RnR Products. The rest of the composite-molded airframe was designed by Insitu Group and produced by RnR.
- Configuration: Twin-boom pusher with an inverted V-tail. This layout provides correct weight distribution for a relatively heavy fuel and avionics payload and places sensors in clear air up front.
- Size and robustness: Operational weight range is 16–26 pounds depending on fuel load and avionics package. The small scale allows an airframe that is extremely robust by large-aircraft standards—important for storm-penetration reconnaissance, including cyclones and hurricanes.
- Cost and logistics: Use of standard RC components and hobby-industry manufacturing keeps unit cost low. If purchased in reasonable quantities, a unit may cost as little as $10,000 including a standard avionics package. With a projected lifespan of 1,000 flight hours, amortized operating cost could be about $100 per hour. The Aerosonde is intended to be a relatively inexpensive, consumable resource that can be risked in hazardous missions.
Powerplant and propulsion
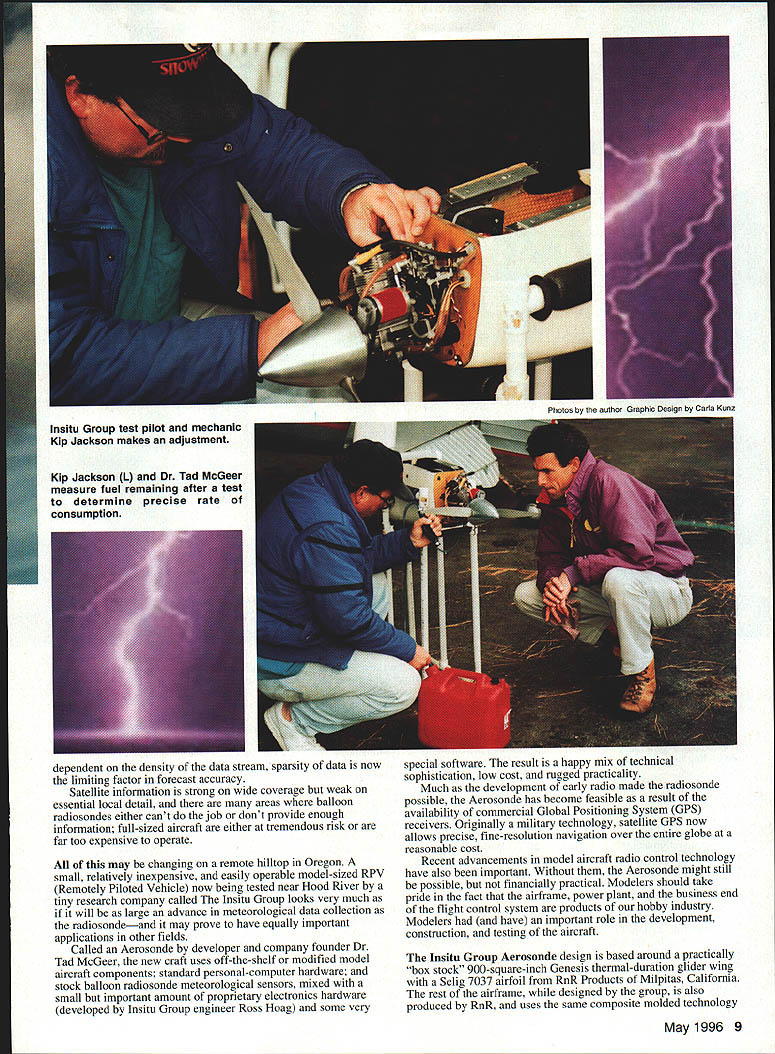
- Engine: Substantially modified Enya 1.20R running on 100-octane low-lead avgas.
- Fuel and oiling: No lubricant mixed with fuel; engine oiling is handled by a small tank and a gravity-feed/check-valve oil-recycling system. A custom six-liter bladder tank from Aerotech Labs is used.
- Carburetion and controls: Walbro WT332 carburetor with a custom intake manifold and an inflight mixture control. Both throttle and mixture servos are mounted directly to the carburetor. Engine rotation was reversed to allow the use of regular tractor props in a pusher configuration.
- Electrical: A small 30-volt brushless generator (modified from an electric RC car motor) is belt-driven from the engine. Ni-Cad flight batteries are charged in flight from the generator.
- Ignition: Capacitive-discharge ignition system paired with a custom ignition-timing system.
- Performance: About 900 W (1.2 hp) at 6,000 rpm on a stock APC 20×8 prop. Tuned to a rock-solid idle of 1,500–1,600 rpm, with an instantaneous, no-stumble transition to full power. Fuel consumption about 120 grams per hour, yielding operational endurance of 24 hours or more.
Flight control and avionics
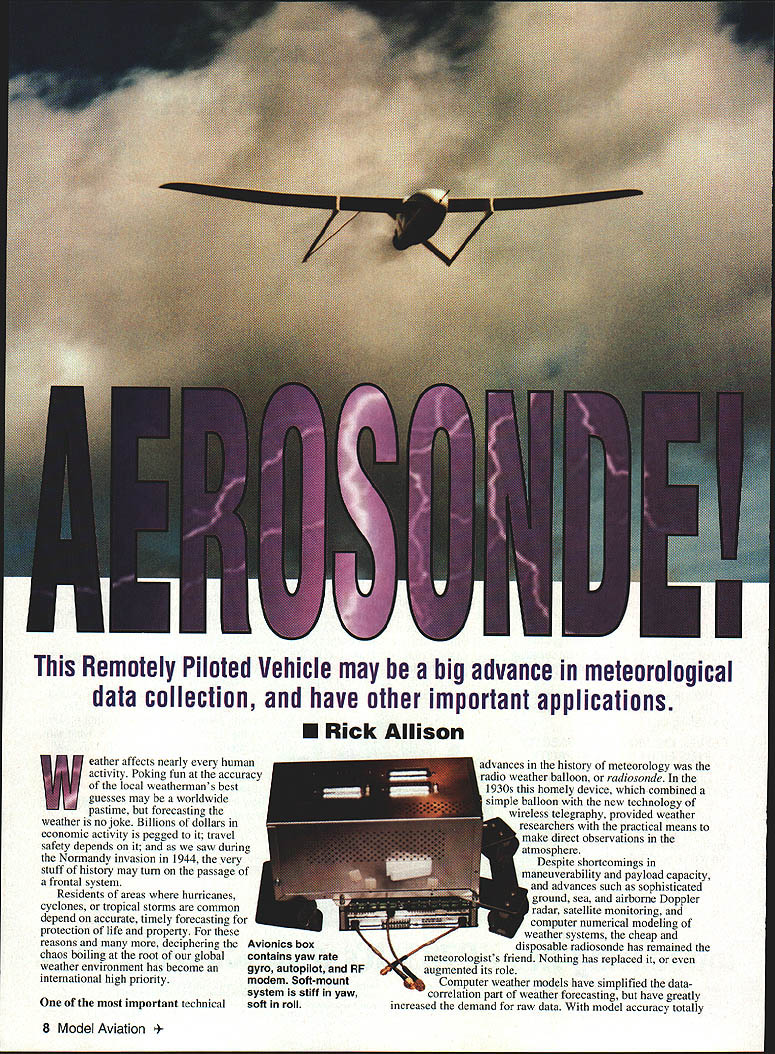
- Flight-control hardware: Uses standard RC radio gear for manual control, augmented by an avionics box containing a yaw-rate gyro, autopilot, RF modem, and other electronics.
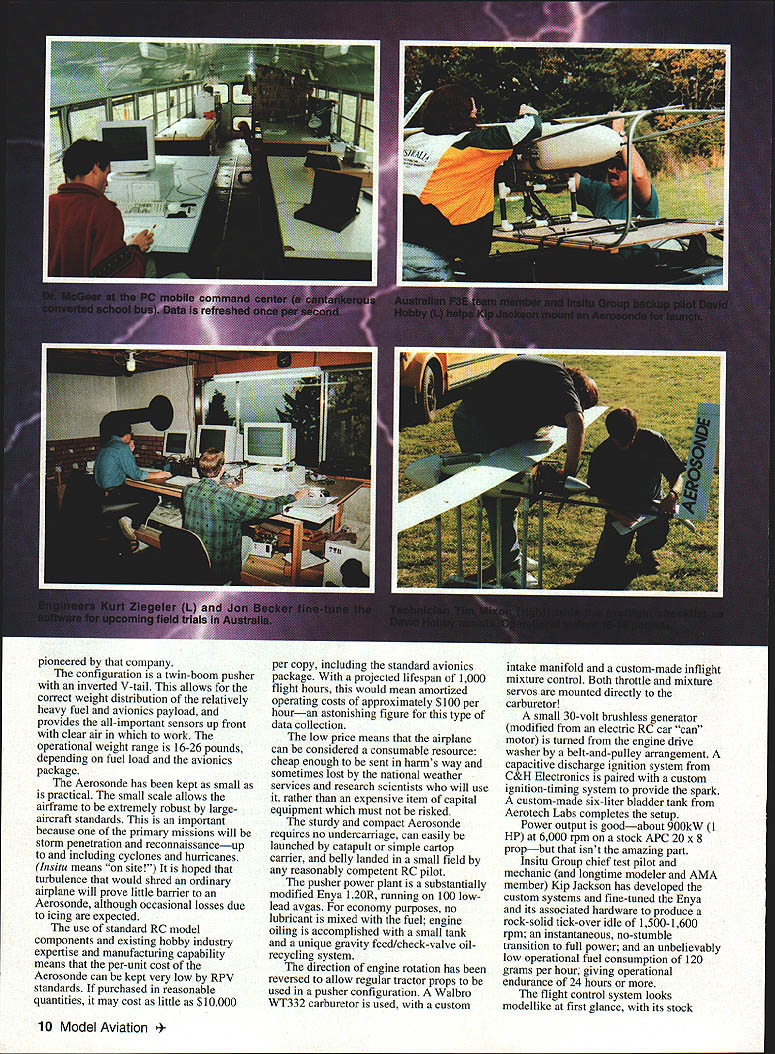
- Autopilot and navigation: GPS waypoints and altitudes are entered from the ground-control unit (a PC). At altitude, control can be handed to the onboard program, which tracks GPS waypoints and altitudes. Waypoints can be changed in flight; the aircraft will assume new tracks. An option for automatic altitude cycling is available.
- Sensors and telemetry: Real-time telemetry downlink provides engineering and meteorological data and stores the same data in onboard memory for backup. The refresh rate is once per second.
- Engineering data includes: engine rpm; cylinder-head temperature; exhaust-gas temperature; commanded servo positions; true airspeed; barometric altitude; GPS-derived aircraft position and altitude; battery voltage; battery charger status; generator output voltage; and avionics-box temperature.
- Meteorological data (standard configuration) includes: wind speed and direction (calculated by differential GPS); inside and outside temperature; barometric pressure; and relative humidity.
- Autopilot design: The system uses a yaw-rate gyro (mounted in the nose) combined with airspeed, altitude, engine rpm, GPS data, and commanded servo positions. Custom embedded firmware sorts inputs and pilots the aircraft based on commanded GPS waypoints. If ground signal is lost, the Aerosonde will continue in a stable holding pattern around the last-known waypoints until contact is regained.
Launch, recovery, and operations
- Launch and recovery: No undercarriage is required. The Aerosonde can be catapult-launched and belly-landed in a small field by a competent RC pilot.
- Control handover: Launch and landing are handled by an RC pilot using a regular transmitter hooked via a buddy-box to the ground-control unit. At altitude, control is passed to the PC autopilot; for recovery, waypoints return the aircraft to base, the recovery pilot visually acquires the aircraft, and control is handed back to the buddy-box for landing.
- Communications: The Insitu Group was assigned a unique test frequency by the FCC for development and testing. An RF modem functions as the receiver; ground-control is a PC (486SX in the original tests) patched to an RF modem and amplifier/antenna unit.
Testing and trials
- Field trials: After initial development, field trials were scheduled to begin in Australia and continue through 1996. Over a small island archipelago off the northern coast, Insitu Group personnel and ten Aerosondes were to participate in phases of the Maritime Continent Thunderstorm Experiment under the Australian Bureau of Meteorology (ABM).
- Sponsorship and funding: Principal sponsorship came from the ABM. Other R&D funding came from weather services worldwide and the U.S. Office of Naval Research. Further trials depended on continued funding.
- Observed performance: The author observed several totally autonomous five-hour flights in 20-knot winds without a hitch, suggesting reliable autonomous operation. U.S. Army observers were present and left impressed.
Planned developments
- Increase service ceiling from about 5 km to 16 km (would require a supercharged powerplant).
- Increase range from about 3,700 km to roughly 7,500 km.
- Double endurance to enable missions of four to five days.
- Potential future additions: satellite-relayed data links, onboard collision-avoidance systems for operations in populated airspace, and fully autonomous launch and landing.
Applications
- Meteorology: Storm-penetration reconnaissance (including cyclones and hurricanes), dense and sustained local data collection to improve numerical weather models.
- Oceanography: Data gathering currently done by manned aircraft and ships could be supplemented or replaced by Aerosondes, freeing expensive assets for other tasks. Applications include sea-breeze monitoring, marine wildlife monitoring (video), aerial surveys, and low-level reconnaissance of shipping lanes.
- Wildlife monitoring: Ground wildlife surveys in remote areas where the small size and low noise of the Aerosonde would be less disturbing than full-size aircraft and far less expensive.
- Other research: Numerous potential scientific and commercial uses are likely to emerge as researchers learn of this affordable tool.
Editor's note
The author spent time with the Aerosonde group before their Australian deployment and witnessed several totally autonomous five-hour flights in 20-knot winds without glitches. It was an impressive display; observers from the U.S. Army were present and left smiling. Dr. Tad McGeer appears to have a promising system on his hands.
Transcribed from original scans by AI. Minor OCR errors may remain.

