
Bob Kopski
All about Electrics
THE FIRST INSTALLMENT of this series in the September issue described some pros and cons of electric-powered models, and last month we covered the motors we use. Some basic aspects of the motors were described, and many practical considerations were covered.
Earlier, I asked you to have faith and read daringly onward. I remind you of this because I realize the subject of this part may appear both simple to some and strange to others. However, I think some of the upcoming information will be surprising and interesting to many—and perhaps a little confusing or difficult for others on their first reading. To still others, some of what follows may be downright boring and seem totally irrelevant; taken alone, it is.
This section, however, combined with other parts of this series, will provide a very intimate and overall feel for exactly what goes on with the motor, battery, and propeller in a given plane—and how these all affect the flight results you get. In other words, as this series continues, it will all "come together." I encourage your undaunted continuance with this series. I'm sure you will find it to be worthwhile.
If this presentation seems all too slow and tedious, remember that this is an introduction to Electrics—on the "installment plan." It's not necessarily an easy installment plan either to read or to write! However, I do maintain that the subject can be generally simple and certainly successful, though not necessarily short.
Perhaps some readers have had disappointments with Electrics just because some details were made light of, or "glossed over" elsewhere. That's why Model Aviation has planned this series—to make sure there is adequate introductory treatment such that anyone who wants to can be a very successful Electric flier. Why, there's even some useful stuff here for Gas guys!
To be honest, even this well-intended series cannot be complete and detail-perfect, for several reasons. One is that I don't know everything. Another is that I'm trying to select the most meaningful and useful offerings consistent with the limitations of publication space and presentation time. All I can do is, in fact, the best I can do. You can be the critic—automatically—by asking questions.
- Propellers and power. Now that you have seen some Electric models in Part 1 and have some introductory insight into motors from Part 2, you could be wondering what this business concerning power, heating, and performance is all about. Let's look at what happens when the motor is required to do its thing—turn a prop and power a plane.
The leading suppliers of Electric flight systems provide instructions regarding choice of model size (and weight) and suitable propellers. These things will also be addressed in another part of this series. In the meantime, to get a good feel for motor operation, propellers, and power, let's look at these things in a static environment, i.e., on the bench rather than in flight. In my experience, there is excellent correlation between what I observe on the bench and what I experience in the air.
A. Power input—no prop
Electrical power is the product of electric potential (volts) and electric current (amps). In our case, motor input power is motor terminal voltage times motor terminal input current amperage. The product (V × A) is power in watts. This power comes from the "energy tank," the battery. This "tank" is a specific size and can deliver only its fill. Part 4 will cover batteries in detail and discuss how much these "tanks" can deliver. Now, however, we're going to get a feel for just how much "fuel" is used by our motors; next month you'll have more appreciation for Part 4.
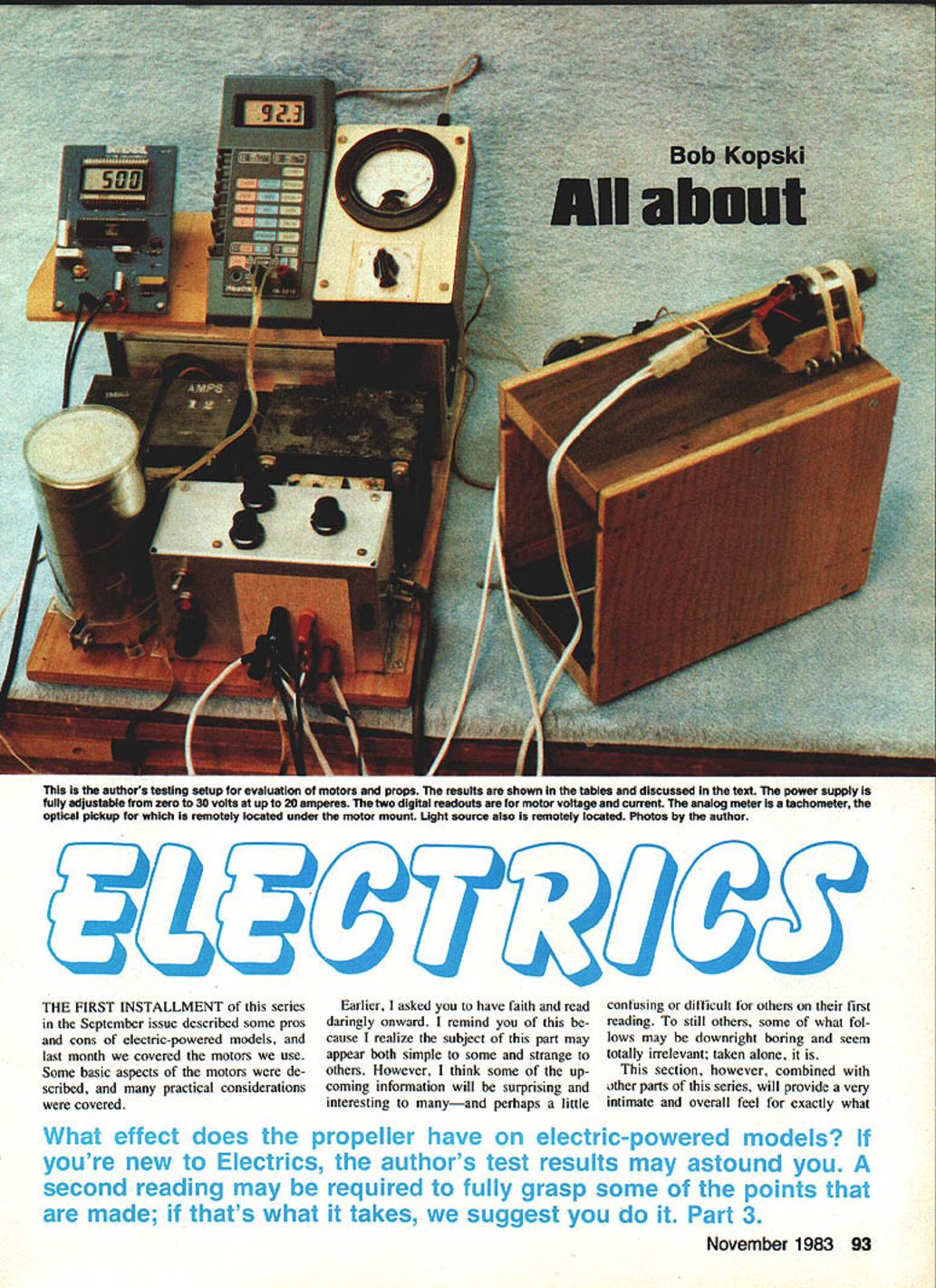
As we mentioned earlier, a motor running with no prop draws only a small amount of current sufficient to overcome losses due to friction and other things. To illustrate, several examples are shown in Table 1. These measurements were made using the test setup that is pictured.
Notice something in particular about the data in Table 1. In every example, the motor current increase is not as large as the increase in voltage that caused it. This will not be the case with a prop.
While all measurements in these tests were made using a convenient adjustable power supply, they are exactly the same results that would occur with the motor battery. For those of you who are interested, the power supply pictured is capable of up to 30 volts at 20 amps and has remote voltage sense to assure correct voltage at the motor terminals. Also, it has an adjustable current limit so I don't have an accident during some zealous data run! While this power capability may sound impressive, believe it or not, I expect to need more capability in the near future.
At this point I want to make a special note. It has been my experience, and I've been told the same by electric flight system suppliers, that performance of production flight motors varies about plus-or-minus 10%.
As you'll also see, props also vary greatly in the load they present to the motor and battery. Of course, measurement of motor performance has instrumentation accuracy associated with it. Thus, there are many reasons why apparent differences in electric flight experience can occur. I'm noting this now, just in case anyone reading this has had, or has read about, different results.
Table 1: Typical Motor Power Input—No Prop
- Motor: Astro 05 (p/n 2107)
- Volts / Amps / Watts
- 6.0 V / 0.75 A / 4.50 W
- 7.0 V / 0.78 A / 5.46 W
- 8.0 V / 0.81 A / 6.48 W
- 9.0 V / 0.84 A / 7.56 W
- Motor: Leisure LT-50 / Pattern Wind
- 5.0 V / 1.19 A / 5.95 W
- 6.0 V / 1.24 A / 7.44 W
- 7.0 V / 1.30 A / 9.10 W
- Motor: Mabuchi RS540S6527
- 5.0 V / 1.18 A / 5.9 W
- 6.0 V / 1.30 A / 7.8 W
- 7.0 V / 1.46 A / 10.2 W
- 8.0 V / 1.53 A / 12.2 W
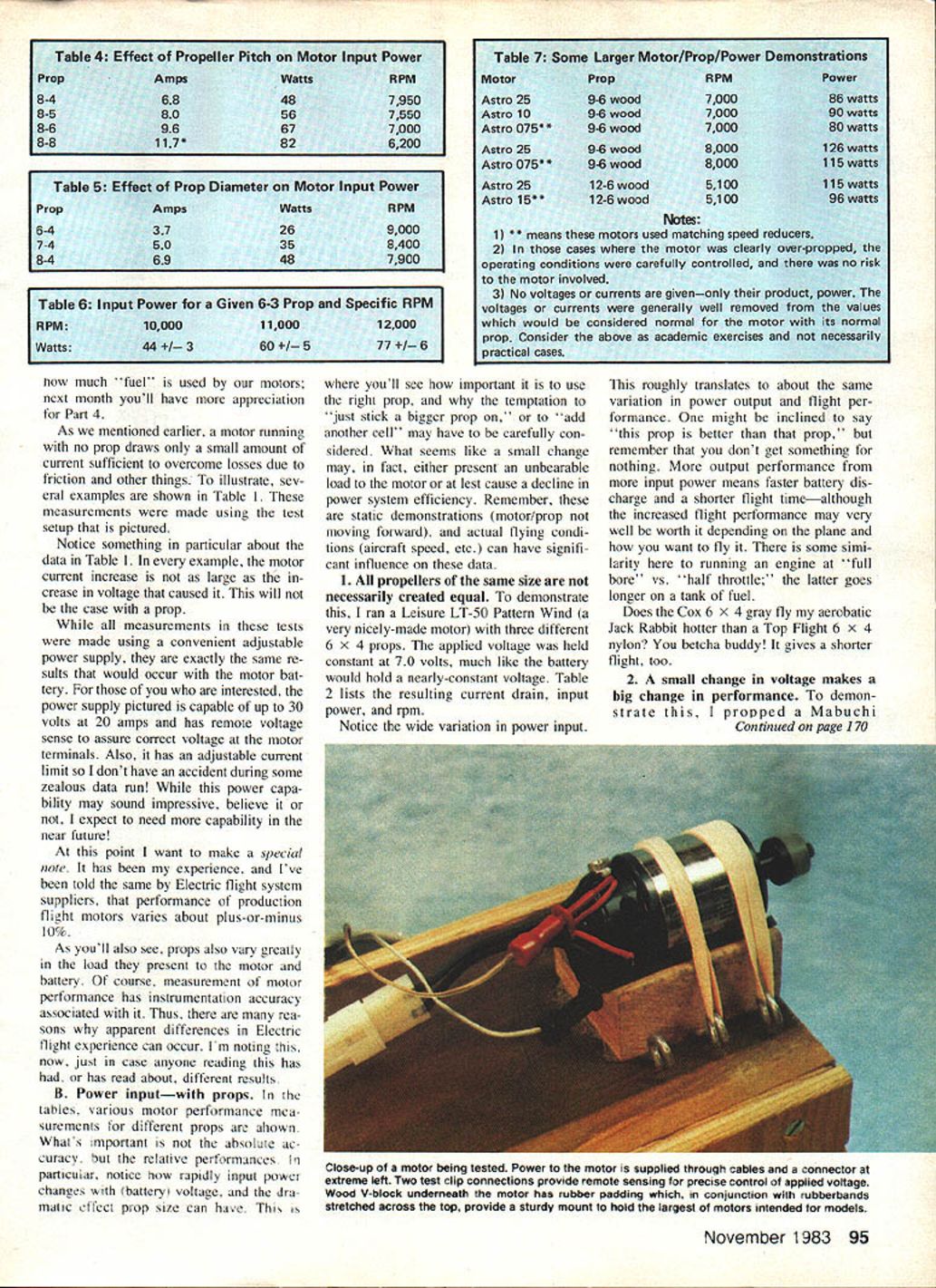
B. Power input—with props
In the tables, various motor performance measurements for different props are shown. What's important is not the absolute accuracy, but the relative performances. In particular, notice how rapidly input power changes with (battery) voltage, and the dramatic effect prop size can have. This is where you'll see how important it is to use the right prop, and why the temptation to "just stick a bigger prop on," or to "add another cell" may have to be carefully considered. What seems like a small change may, in fact, either present an unbearable load to the motor or at least cause a decline in power system efficiency. Remember, these are static demonstrations (motor/prop not moving forward), and actual flying conditions (aircraft speed, etc.) can have significant influence on these data.
- All propellers of the same size are not necessarily created equal. To demonstrate this, I ran a Leisure LT-50 Pattern Wind (a very nicely-made motor) with three different 6 × 4 props. The applied voltage was held constant at 7.0 volts, much like the battery would hold a nearly-constant voltage. Table 2 lists the resulting current drain, input power, and rpm.
Table 2: Performance Variation of Various "Same Size" Props (6 × 4)
- Top Flite Nylon: 11.6 A / 81 W / 13,300 RPM
- Top Flite Wood: 13.3 A / 93.1 W / 12,700 RPM
- Cox Gray: 15.5* A / 109 W / 12,200 RPM
Notice the wide variation in power input.
This roughly translates to about the same variation in power output and flight performance. One might be inclined to say "this prop is better than that prop," but remember that you don't get something for nothing. More output performance from more input power means faster battery discharge and a shorter flight time—although the increased flight performance may very well be worth it depending on the plane and how you want to fly it. There is some similarity here to running an engine at "full bore" vs. "half throttle;" the latter goes longer on a tank of fuel.
Does the Cox 6 × 4 gray fly my aerobatic Jack Rabbit hotter than a Top Flite 6 × 4 nylon? You betcha buddy! It gives a shorter flight, too.
- A small change in voltage makes a big change in performance. To demonstrate this, I propped a Mabuchi RS550S6530 (good, inexpensive, hard-to-get motor) with a Top Flite 7 × 6 nylon. Table 3 shows what happens to the input current, input power, and rpm as the voltage is varied. The test voltage range chosen might easily represent battery behavior from just-off-charge through most of its useful run-down. Notice the dramatic power change.
Table 3: Typical Motor/Propeller Performance with Voltage Variation
- 6.0 V / 7.95 A / 48 W / 8,000 RPM
- 6.5 V / 9.05 A / 59 W / 8,550 RPM
- 7.0 V / 10.00 A / 70 W / 9,050 RPM
- 7.5 V / 11.00 A / 83 W / 9,600 RPM
- 8.0 V / 12.10 A / 97 W / 10,000 RPM
- 8.5 V / 13.00 A / 111 W / 10,500 RPM
Again, the static behavior shown in the table is an indication of flight behavior. Yes, an Electric is noticeably "hotter" right after charge. Ni-Cd cells characteristically drop their initial high terminal voltage rapidly, then slowly decline through a long plateau, and then finally drop dramatically at end-of-charge. That's how the plane flies, too. (I've always had a feeling that some suppliers advertise their product's performance right at the charge peak.)
- For a given propeller, a small change in rpm is representative of a significant change in power/performance. This is another key piece of information evident in Table 3. Don't treat a few hundred rpm change with disregard. (This works for Gas, too.) A seemingly small change in tachometer reading can, indeed, be significant (and so is tachometer accuracy if you're comparing results with others).
Now, we'll look at the implications of changing prop size, both diameter and pitch.
- Variation in prop size has a significant effect on power and performance. To demonstrate this, I used one of my favorite motors, an older version of the Astro 075. The motor was powered with a constant 7.0 volts. All propellers were Top Flite wood. Labeled size was assumed accurate. First, the diameter was held constant, and the pitch was varied. The results are shown in Table 4.
Table 4: Effect of Propeller Pitch on Motor Input Power
- 8 × 4: 6.8 A / 48 W / 7,950 RPM
- 8 × 5: 8.0 A / 56 W / 7,550 RPM
- 8 × 6: 9.6 A / 67 W / 7,000 RPM
- 8 × 8: 11.7 A / 82 W / 6,200 RPM
Then, the pitch was held constant, and the diameter varied. Results are shown in Table 5.
Table 5: Effect of Prop Diameter on Motor Input Power (pitch 4)
- 6 × 4: 3.7 A / 26 W / 9,000 RPM
- 7 × 4: 5.0 A / 35 W / 8,400 RPM
- 8 × 4: 6.9 A / 48 W / 7,900 RPM
From Tables 4 and 5 you can easily see how variations in prop size can significantly affect motor power. In these examples, where the applied voltage was held constant, the current increased with prop size, and thus the power increased. This illustrates in rather graphic fashion the relationship of power input, and up to a point, power output, with increasing prop size. This power increase has associated with it the dual consequences of more rapid battery discharge and, for high enough currents, some risk to the motor brushes.
- For a constant applied voltage, the slower a motor turns, the higher is the current drain. This is also evident from Tables 4 and 5. Thus, for a fast-moving plane, where the effective propeller rpm increases due to prop "unloading," the current demand drops. Translation: longer running time! Conversely, a small prop turning high revs on a large, slow-moving glider type is approaching static test conditions, with relatively higher current and inefficient power utilization because the prop is "slipping." In this example, a larger, slower-turning prop on a speed reducer will make much better use of the available energy stored in the battery. In any case, current demand always drops in flight; it's only a question of how much. More later.
All the test conditions used in the demonstrations herein were considered to be within the reasonable range of operating capability of the motors used, except for (*) values. In these cases, data was taken very quickly. These higher current levels were either known to be damaging or I was not sure and did not want to find out. On the other hand, some of the data points are for power levels too low for useful flight. Nevertheless, all representations are believed to be fair. Again, it's the relative performance parameters and not the absolute accuracy that matters.
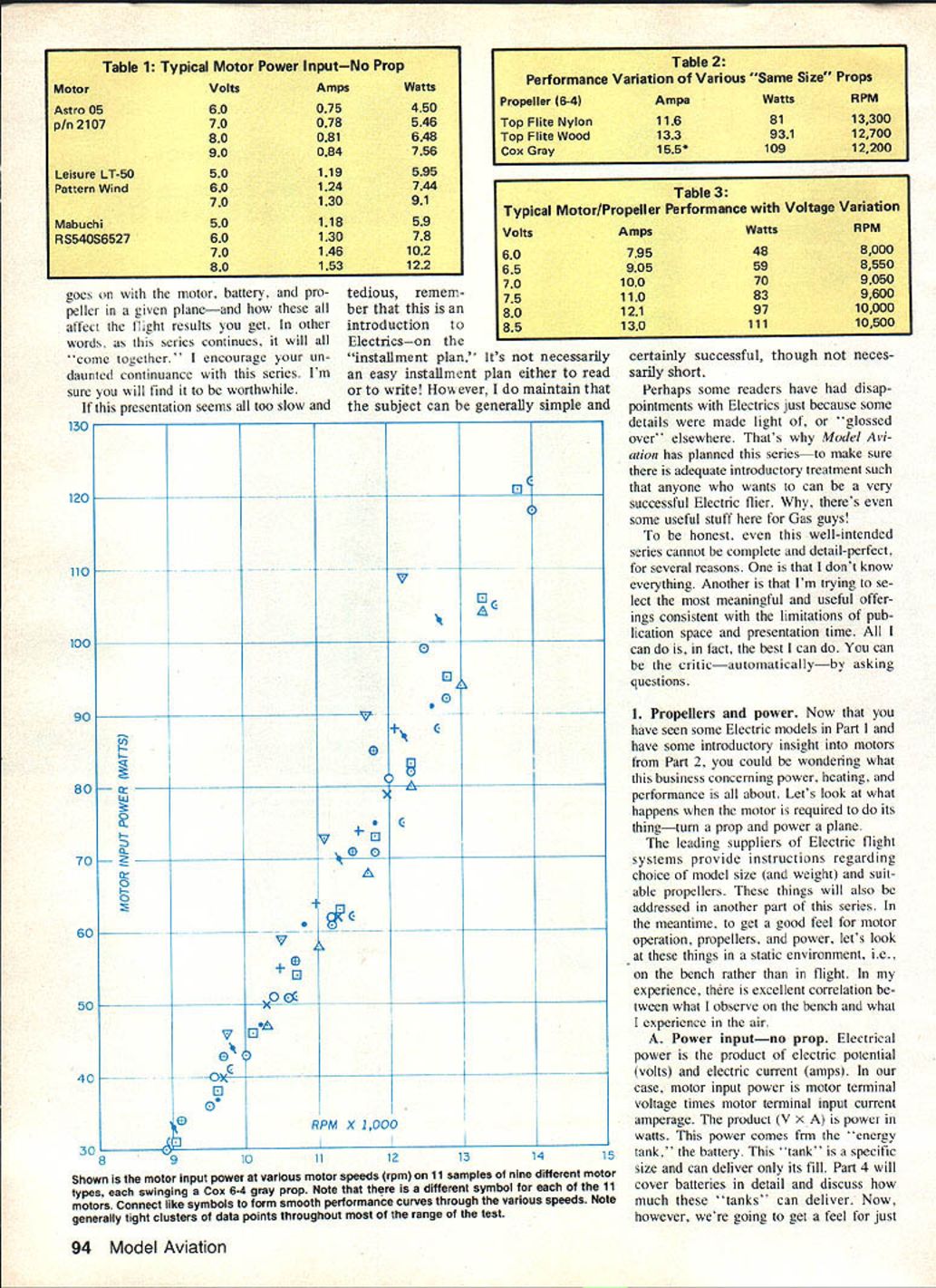
- The power input required by most motors to turn a given prop at the same rpm is nearly the same. This may be the most surprising performance factor of all, vividly shown in an accompanying graph that compares the power input of 11 samples of nine different motor types all turning the same 6 × 4 propeller.
For the same propeller, eight of the 11 motors performed within the ranges shown in Table 6.
Table 6: Input Power for a Given 6 × 3 Prop and Specific RPM
- RPM 10,000: Watts 44 ± 3
- RPM 11,000: Watts 60 ± 5
- RPM 12,000: Watts 77 ± 6
Three motors were considered removed enough from the trend to be excluded from the table. The most removed (inefficient) of these had a power input (watts) of 51 at 10,000 rpm, 70 at 11,000, and 101 at 12,000.
From this information, it is evident that, for the most part, the propeller determines the input power for a given rpm, and for the most part, the motors used are of comparable efficiency—at least over the reasonable operating power range for which they are designed. This last statement means that power lost in the motor in the process of it doing its intended job is about the same for most motors. This lost power is mostly in the form of heat—more on this later.
It's interesting to note that the most and the least efficient motors tested were among the most costly! The middle-of-the-road was occupied by comparatively low-cost, sleeve-bearing types, with some exceptions. Of course, the most efficient motors, in that they consume the least power in spinning a given prop, will run the longest on a particular battery.
Names of the motors in the tests will not be supplied, unless the inquirer is one of the manufacturers involved.
For those readers who think I'm hung up on small motors and props, allow me to provide some information on bigger stuff in Table 7. This data is limited, and admittedly represents some unlikely and even undesirable combinations, but my point about props determining motor input power is further illustrated.
Table 7: Some Larger Motor/Prop/Power Demonstrations
- Astro 25 / 9 × 6 wood: 7,000 RPM / 86 W
- Astro 10 / 9 × 6 wood: 7,000 RPM / 90 W
- Astro 075** / 9 × 6 wood: 7,000 RPM / 80 W
- Astro 25 / 9 × 6 wood: 8,000 RPM / 126 W
- Astro 075** / 9 × 6 wood: 8,000 RPM / 115 W
- Astro 25 / 12 × 6 wood: 5,100 RPM / 115 W
- Astro 15** / 12 × 6 wood: 5,100 RPM / 96 W
Notes:
- ** means these motors used matching speed reducers.
- In those cases where the motor was clearly over-propped, the operating conditions were carefully controlled, and there was no risk to the motor involved.
- No voltages or currents are given—only their product, power. The voltages or currents were generally well removed from the values which would be considered normal for the motor with its normal prop. Consider the above as academic exercises and not necessarily practical cases.
One comparison in Table 7 really stands out and deserves further comment. I'm referring to the Astro 25 and the Astro 075 with speed reducer, both turning a 9 × 6 at 8,000 rpm. Remarkable, isn't it? What's the catch? None, but there are some considerations.
The 25 is operating well below its "normal" or intended power level, which is more than twice the power level shown. One might say that the 25 is being underutilized in this example. On the other hand, the 075 system is being very well used. It's lighter in weight and lower in cost, but it could not reasonably be pushed to the much higher normal power capability of a 25. Whatever, the prop is dictating the power demand, which is the point I'm making.
When we get to Part 4, batteries, you'll see why these "energy tanks" must be considered as part of the total electric system picture—where the choice of each system component is sort of a "team" choice. Translation: If you want to run a 9 × 6 at 8,000 (or any other motor/prop/rpm combination) and fly some plane for some specific duration, the battery (because of the practicalities of cell size, number of cells, and charging considerations) and not the motor/prop, may be the primary consideration.
- Motor, propeller, and plane efficiency
Many of the data examples given in this part have been for "nominal" operating conditions of a motor and propeller. By this I mean that many are operating conditions which would be representative of good flying power levels. Putting it yet another way, these would be conditions of reasonably good efficiency for many of the motors and props presented when used in a suitable plane.
Efficiency, or the power output divided by the power input, is always a number less than one, meaning you get less out than you put in. The difference is wasted power, which was mentioned earlier. Another point made earlier was that (electrical) power input to the motor was easily measured and was simply the product of motor input voltage and current. Power output—related to the work done by the motor and its propeller in moving both the air and plane—is not so easily measured.
Anyway, there is an "efficiency curve" which has a shape a bit like the hook on a clothes hanger, or maybe like the climb, level-off, and dive of a roller coaster. It means that at some power range there is a maximizing of efficiency—the place where the percentage of power lost is least.
From information I've seen, this "peak" is actually rounded and usually represents a rather broad range of good power utilization. In other words, you don't have to be operating exactly on the very peak (impossible to maintain, anyway) to enjoy a lot of great flying. Far on either side of this broad maximum region, however, for operating extremes, the efficiency can be terrible, and the flight, if any, will also be terrible.
Here are what the extremes (low ends of the efficiency curve) can come from. On one end, for low power levels, the ratio of output power to input power is small because, for example, much of the input power goes into the kinds of losses shown in Table 1 — the "no prop" power used to overcome friction, etc. Thus, a small amount of power delivered to a prop may be comparable to, or less than, that lost. This would almost always be a no-flight condition, anyway; as we saw, this power region is in the very low wattage region, indeed.
At the other end of the efficiency curve, for very high input power levels, motor losses rise very rapidly due, for example, to heating. This area of operation is where current input is very high, such as when too much voltage is applied or too large a prop is used. The power lost to heat rises rapidly because the power is the product of current times current times resistance, commonly called "I squared R" losses. The resistance is that of the armature windings, brush-to-commutator contact resistance, and brush material and brush connection resistance. But the big driver is the current times itself. Thus, under such conditions, the more and more current input, the lower and lower is the percentage of power output. The efficiency curve drops off, and sooner or later the motor may go "belly up" from excessive brush heat. This is where most of the heating concern that I've alluded to so often comes from.
A few more words on this. Many motors currently in use are simply adaptations of some readily available, often imported, standard, low-cost unit intended for consumer applications. There is nothing at all wrong with this, for this allows variety at low cost. But from what I can see, our application in model use probably tasks these motors far more than any other intended application. Our application is, I feel, putting the motors at or past the limits of their design intent. In my experience, the first manifestation of this is brush damage at very high currents. Anyway, more and more motors are becoming available which have much better behavior in this regard. This, and other things, are parts of the continuing Electric evolution.
Later, when we get to planes and installations, we'll look at some actual examples of operation and some guidelines to help assure longevity to your investment along with lots of enjoyable flying fun.
By now it should be clear that the motor and prop are not independent of the plane. What can be too much for a motor on the bench (static) may not at all be the case in the air, providing the plane moves out quickly, allowing the prop to unload. As mentioned earlier, a motor turning a small prop fast on a slowly-moving glider-type is inefficient and potentially a bad-for-the-motor situation. Now let me describe an example that's similar but in the other direction.
I've twice had occasion to help someone with an ARF Kraft Shorestring. These attractive planes had an OS-sized motor on six cells of 0.6 Ah size. The nylon props were 8 × 6. The planes just sorta mushed along. In studying the situation with respect to weight, area, etc., it seemed to me that they really should fly better. We changed the prop to a nylon 7 × 6, and that did the trick. The motor turned up faster, as expected, and it drew less current. The motor-prop-plane combination was now much better, and in fact the plane was much more fun to fly. Simple, huh? But how does one know what to do? You may not have realized it, but a clue to this solution came three paragraphs earlier—look back and see.
Admittedly, the above discussions are simplifications and incomplete; there's more involved in motor/prop/plane performance than discussed so far. But I think we've gone far enough for most of you to get the general idea—that there's a variety of motors available, that most work quite well, that prop choice and power are closely related, that for good results an efficient motor/plane/prop combination is all that's needed. Well, almost.
One more subject must be covered before we can look at what works well together, and this topic comes up next month—Batteries.
Remember, I promised two things: basics, and things that work. I intend to keep this commitment. So far we've been dealing mostly with the first part of the promise. To those of you who will seriously pursue Electrics, the basics given here will, sooner or later, directly contribute to the success of your own Electric design choices and be part of making you that guy mentioned in Part 2, the guy who understands the basics, who knows what to do and how to do it, and why it works—the guy who's "got it all together" in Electrics.
A closing note. The first four parts of this series will have been written before Part 1 reaches readers. I expect each installment will raise questions. Despite my good intentions, I know some things will be overlooked and some things will be unclear. You can be a welcome critic in this regard. Perhaps those most-asked questions can be collected with answers and presented for all to read in a "wrap-up" installment. In the meantime, I will endeavor to be responsive to individuals as expeditiously as possible. Please direct any questions (with SASE) to the author:
Bob Kopski 25 West End Dr. Lansdale, PA 19446
Transcribed from original scans by AI. Minor OCR errors may remain.

