


All About Electrics
At this time, let me repeat something I said in the beginning: it is often difficult or impossible to have first-hand familiarity with everything. This means that the best I can do is offer that which has been learned from personal experiences I've had. It is my intent to include a representative cross section of this experience — of course, according to my way of looking at it. If you don't find your product of interest covered, I still may have some familiarity with it, so please do write.
Performance
I have made frequent reference to power. Part 1 detailed how the electric system is a viable power source for models. Part 2 detailed motors, part of the power train. Part 3 illustrated the effects of propeller size on the power demand placed on the battery and showed that, for the most part, the propeller selection essentially determines power (all other components of the electric motor system being appropriate). Part 4 discussed the batteries used in electric models — the "fuel tanks" or energy containers — the model's power source. Parts 5 and 6 showed proven ways of installing all of the components needed to power a plane. That brought us up to "what flies," complete with some rules of thumb covering power, among other things.
What is "performance?" It has been common to see and hear routine references to "performance" and "power" as almost interchangeable. Many view and use these terms in the same sense: "This motor is more powerful than the other one," or "The plane really performs with such-and-such motor." While power and performance are related, they are not the same.
My usual approach is to first decide what kind of performance I want and let this dictate the power that is needed. Power is the time rate of doing work, such as pulling a plane up at some climb rate. High power will do it faster than low. The battery size (which roughly equates to battery weight) establishes the "how long" part.
Remember those histograms in Part 7? They were really pictures of performance. In my thinking, performance is part of the plane's "personality." The 54-inch Taylorcraft mentioned in Part 5 would not have truly impressive flight performance if all it could do was skyrocket for about 30 seconds and then glide. To me, truly impressive performance for such a model starts with the ability to climb with graceful, shallow confidence, then continue gradually upward, maneuver appropriately within sight and control of the pilot and flying field, perhaps pull an occasional lazy loop, and land a satisfying number of minutes (perhaps seven or eight) after launch. For this plane, that is performance. To achieve this, one would choose an electric system of minimum weight that could deliver the needed power for the desired time to result in this performance.
At the other extreme, an F3E FAI machine in the heat of international competition requires an onboard electric system capable of tremendous power delivery for short periods of time — a totally different perspective of performance and power from the Taylorcraft example. Of course, there's a whole range of model behavior, or performance, in between the two examples.
Thus, electric flight performance is a combination of considerations adding up to how a particular plane flies and for how long. Remember, a battery can deliver only its fill; it empties first when doing the heavy power demand, and that means the motor run time will be relatively short. The converse is also true. Keep these distinctions in mind as you plan your electric undertaking.
Which motor, prop, and battery?
Over these past few months this series has covered everything you need to know to be successful with electrics — except for which motors can do what. That's where we are right now. Before we proceed with particulars, you may do well to review earlier parts of this series, especially Parts 2, 3, and 4. First, some preliminary comments.
This past decade — "the first decade of Electric" — has seen a surprisingly large (and sometimes confusing) array of motors and related products come and go. One reason for delaying this topic was that several new products recently appeared, and I wanted the opportunity to try some so I could include the latest information here. In particular, I've bench-run several new cobalts and ferrites and am now planning new planes to put them into.
Since I've mentioned two kinds of motors, the following reduces contemporary confusion. Basically, there are two popular motors in use:
- Cobalt
- Everything else
The segregation has to do with the type of magnetic material used in the motor field magnets. Samarium-cobalt material produces stronger magnetic fields than barium ferrite, for example, for the same size or weight of material.
As I see it, cobalts are not inherently more powerful than the others, because motors do not "create" power. Power has mostly to do with the (suitably chosen) battery and prop. However, cobalts do offer higher performance; they are better in almost every way. They are generally better made. One example is in the brush‑commutator area where better materials and design often allow the motor to "take more," which should equate to "give more." In other words, cobalts can often handle more power. Another nicety is that the smaller cobalts have heavier armature shafts; these are harder to bend or ruin in a landing.
The cobalts tend to be the most efficient of all motors. They turn a given prop at the same rpm with somewhat less electrical input power; that, of course, is always welcome, for it means a longer motor run. In addition, these motors can accommodate a greater range of battery voltages and prop sizes; therefore, they are more versatile. The Keller 50/24 SL, with optional flux rings, is an example of versatility — several motor "sizes" in one.
As another bonus, cobalts are smaller and lighter, which is good news. Of course, these good features do not come without expense. As a guideline, expect to pay about two to five times as much for a cobalt versus other motors of the same "size."
While I have flown many motors over the years, very few of these have been cobalts. I expect this will change as more cobalts become available. I have several on hand waiting for suitable planes and warm weather. However, I also expect to continue using the lower-cost variety as well. I can't forget those many thousands of good flights I've had with economical motors. There is a place for both. Not everyone wishes to invest heavily when first testing the electric "waters." For the less-skilled or learning pilot, you're better off having a mishap with a $15 motor than an expensive one.
Since I have touched on size — part of the subject at hand — be advised that what follows is my way of viewing motor size, and it has nothing to do with electric "classes" or anything of that sort. My offering is simply to establish the particular motor, battery, and prop that go together with some plane to achieve a desired performance. I do this by viewing motors according to power-handling ability.
This way of dealing with motor "size" is the result of extensive accumulated experience — something not everyone has. In effect, I attach conservative but reasonable operating limits (voltage and/or current) to every motor I use. Every motor is capable of efficiently handling some range of voltage, current, and work load. This series has used "motor power input" as a reference throughout.
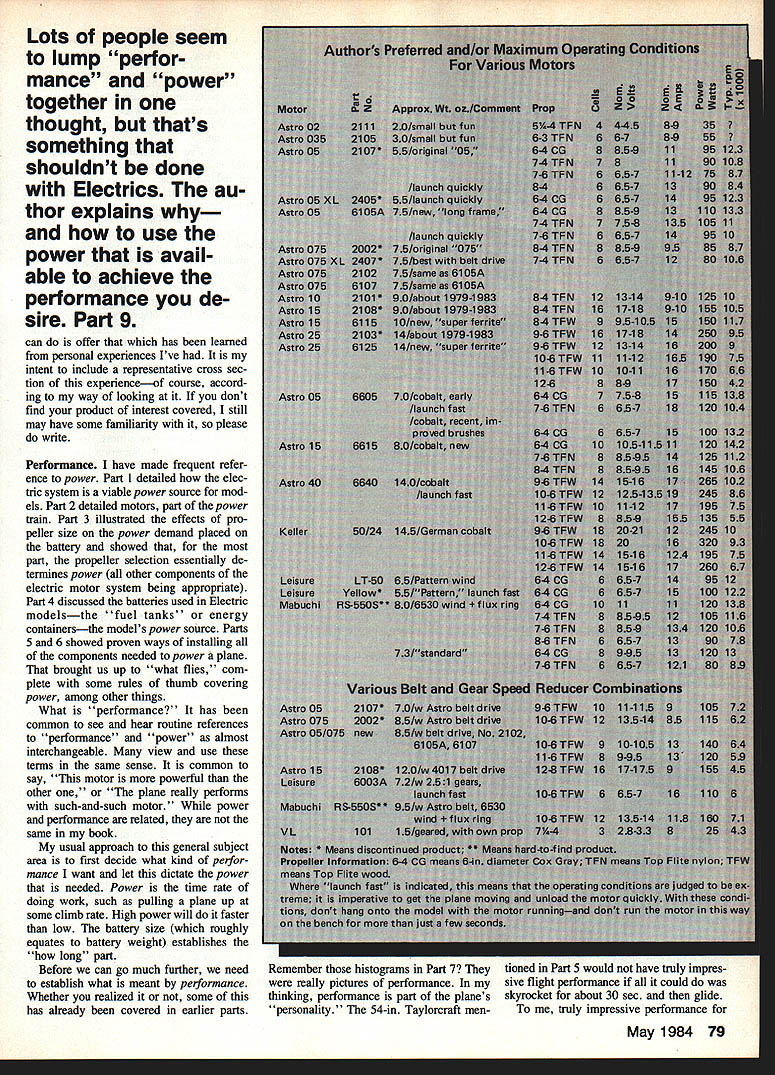
One difficulty with my approach is that it is based on my experience, judgment, and preferences. Since it is not an established standard, you cannot readily find applicable data except here in this series. For this reason, I have attempted to provide an extensive listing with the hope that most everyone's interest will be met. If possible, I will add to this listing in the future as I get more information. And yes — I took every single data point that is given.
In the tabulations you will find many combinations of motors, props, voltages, and currents (amperes) which, when viewed with the information of the preceding parts, should permit you to mix and match available hardware to your choice of model to achieve the performance you desire. The table at the end of the series "goes together." If you apply the lessons of the past to the information in this installment, you will have brought it all together, and Electric Elation is yours!
Some of the products listed in the table are now discontinued, but since many are still in use, I have included the information. Some motors are quite new, and while I have bench data on them, I may not yet have flown them.
The operating conditions given are the actual ones I would use. Most (but not all) are also the maximum levels I would impose. Keep in mind my conservative attitude. You will no doubt find cases where my choices differ from the manufacturer's recommendations. I have had plenty of experience with published combinations which very rapidly ruined brushes and commutators. These have been costly lessons. I am well aware of the strong temptation to just put a bigger prop on; I've paid hard cash for replacements too often to repeat that blunder!
The bench data has been taken as described earlier in this series. This data correlates well with actual flying results for most applications. Remember that the prop unloads when in flight; motor current decreases (perhaps 10–15%), and cooling air flows to the motor and battery (if you've applied what you've read in this series). Most importantly, the power information given is directly applicable in the various rules of thumb provided previously.
Determining motor limits
Basically, there are two limitations I recognize in determining where to quit pushing a motor:
- Current limitation: In the absence of better data, the manufacturer's published continuous rating should be heeded.
- Temperature limitation: How hot the motor will run under proposed operating conditions. This is more difficult to quantify. Some motors tolerate very high temperatures and still perform well; others suffer rapid brush and commutator damage at far lower temperatures.
A sensible approach is to run the motor on the bench with the proposed load and measure temperatures after a few minutes. Check bearing temperatures as well as the commutator and case. Many motors are safe at, say, 140°F; others should be kept below 120°F. Keep in mind that motor temperature in flight will often be lower due to air cooling.
One useful rule of thumb is to limit current to the motor to the manufacturer's continuous rating; for short bursts you can go higher, but expect increased wear and reduced life if sustained.
Example: Moderate-sized sport electric application
First, the power system. We'll start here because it may represent your biggest cash outlay.
An easy choice is something based on a six-cell, 1.2 Ah battery. These are popular and easy to charge. Suppose we want a useful power run of about 5 minutes and we use the conservative charging techniques described in Part 4. This means the battery will be charged about 60–65 ampere-minutes. We expect to get about 90% of this charge out of the battery, or about 55 ampere-minutes (which at 5 minutes corresponds to an average current of 11 A).
If our power system required an average current of about 11 A, a nominal 5-minute motor run would result. The power to the motor would average about 75 W (about 6.8 V × 11 A) during the battery run-down. If you look at the table you'll see there are plenty of lightweight motor/prop combinations you could choose. Some of those given will put a bit more power; others could be outfitted with slightly smaller props, or a speed controller could be used.
What can we do with about 75 W? From Part 8 we know how to relate "cruise" to motor input power, and that's a start. Since this is a "sport" plane, let's pick a wing loading of about 14 oz./sq. ft. Using Rule of Thumb No. 1:
Rule of Thumb No. 1: Watts = Pounds × (oz./sq. ft. to cruise)
Therefore, 75 = Lb. × 14, so plane weight = 75 / 14 ≈ 5.25 lb.
This plane would be large but not very impressive. While the equation predicts cruising flight, the plane would be no fun to fly. It would be large and marginal. In fact, in hot, humid weather you might experience powered sink. Bystanders would announce with glee that electric is no good!
What do we do? Cut the weight by about half (or a little more). The design begins to shape up — a 2.5 lb (40 oz.) airplane with about 75 W of power is reasonable. The power system battery will weigh about 2 oz. × 6 cells = 12 oz. The average motor for this application will weigh about 7 oz. Add an ounce for wiring, etc., and the power system will weigh 19–20 oz. This is about half the total planned weight, thus conforming to Rule of Thumb No. 3 given last month. A three-channel radio with small servos and a 250 mAh pack will be about 7 oz. That leaves about 13 oz. for everything else. Is this possible? Yes.
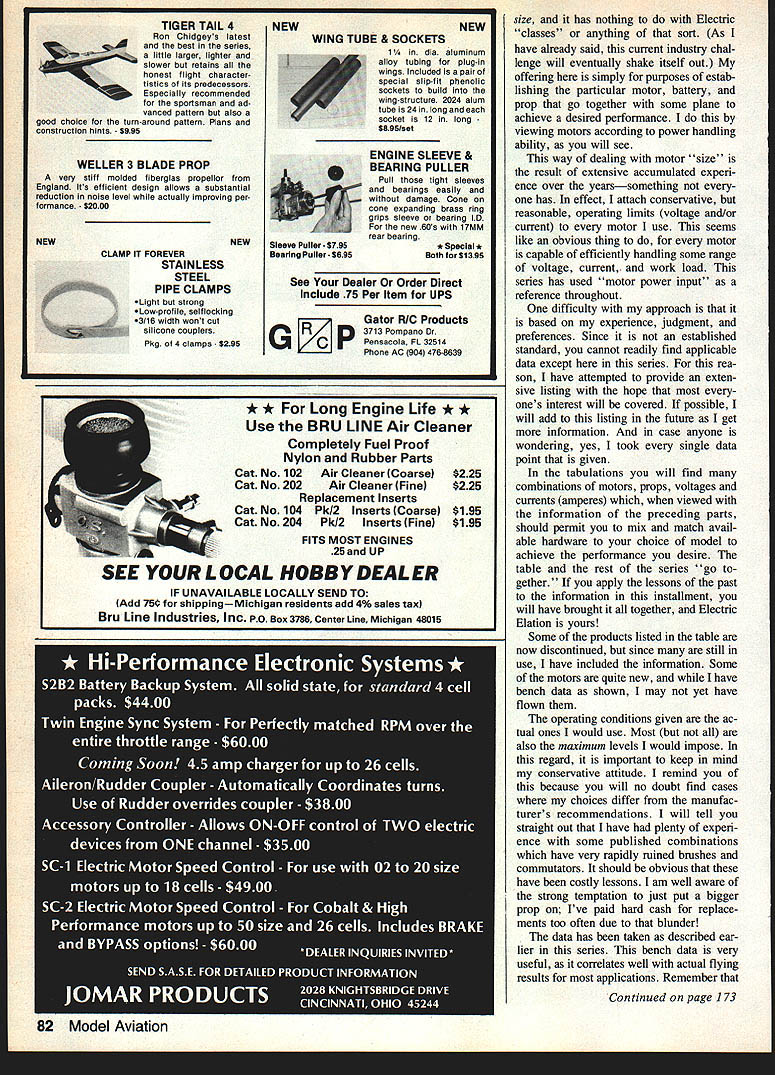
Look at Ken Stinson's version of Spectra. His choice was the Astro 2107 (now discontinued; a suitable alternate is no problem), an 8×4 Top Flite nylon prop, the six-cell pack, three channels, and an all-up weight of about 38 oz. — 5% below our design goal. The wing is 8 in. by 50 in., and the loading is about 13.7 oz./sq. ft. Does the power portion of the flight reach 5 minutes? Yes. The table predicts a 13 A, 90 W operating condition for this combination, but remember current will drop around 10–15% in flight. That's pretty close.
What about total flight time? Since Ken flies his plane part of the time in a glide, a typical flight is 8–10 minutes. Ken learned to fly with this plane, and he generally flies it in what can honestly be called a "sport" fashion.
That's how it's done. Simple, huh? I told you earlier there was no magic involved. But remember that weight is a very sensitive parameter in determining the resulting performance of an electric. Rule of Thumb No. 1 only puts you in the ballpark for power to cruise — not much "performance." As in the example above, make your plane half (or less) the weight predicted by the rule and electric elation will be yours.
Is it possible for something to go wrong such that all the arithmetic is correct, but the plane still won't fly well? Yes. The rules of thumb were for nominal planes. For example, Ken's plane has a time-honored 12% flat-bottom section. An 8% fully-symmetrical "500 class" airfoil likely wouldn't work with this power level. Other things could make a design grossly inefficient — for example, an unimaginably small 3-inch prop at 25,000 rpm, or a combination of high wing loading, a sufficiently thin airfoil, and lots of drag (as on a scale job). The speed required to sustain lift might not be possible with any prop of reasonable diameter and pitch for the estimated power. Yes, if you work at it, you can make it not fly, and "prove" that electric doesn't work. That's not the point of this series.
Closing and what's next
That's all, folks — not really. Even though I feel it has all come together as promised, there is still more to say. Next month, Part 10 will be a wrap-up review of sorts. We'll touch up some "thin" areas and look at the most-often-asked questions. I'll try to include more photos and information on outstanding models that have been built in electric-fly events. A construction article will follow in a subsequent issue. Then there will be some series supplements. While plans for the latter have not been fully developed, I expect they will cover selected subjects in detail — for example, basic electric motor wiring or measurements, suitable model designs, new products as they emerge, or popular kit conversions to electric.
If you have ideas for these supplements, please send in your suggestions. If you have questions related to this or previous installments, please direct them (with SASE) to the author:
- Bob Kopski
- 25 West End Dr., Lansdale, PA 19446
Transcribed from original scans by AI. Minor OCR errors may remain.

