

Canards and Stability
By Tom Hunt
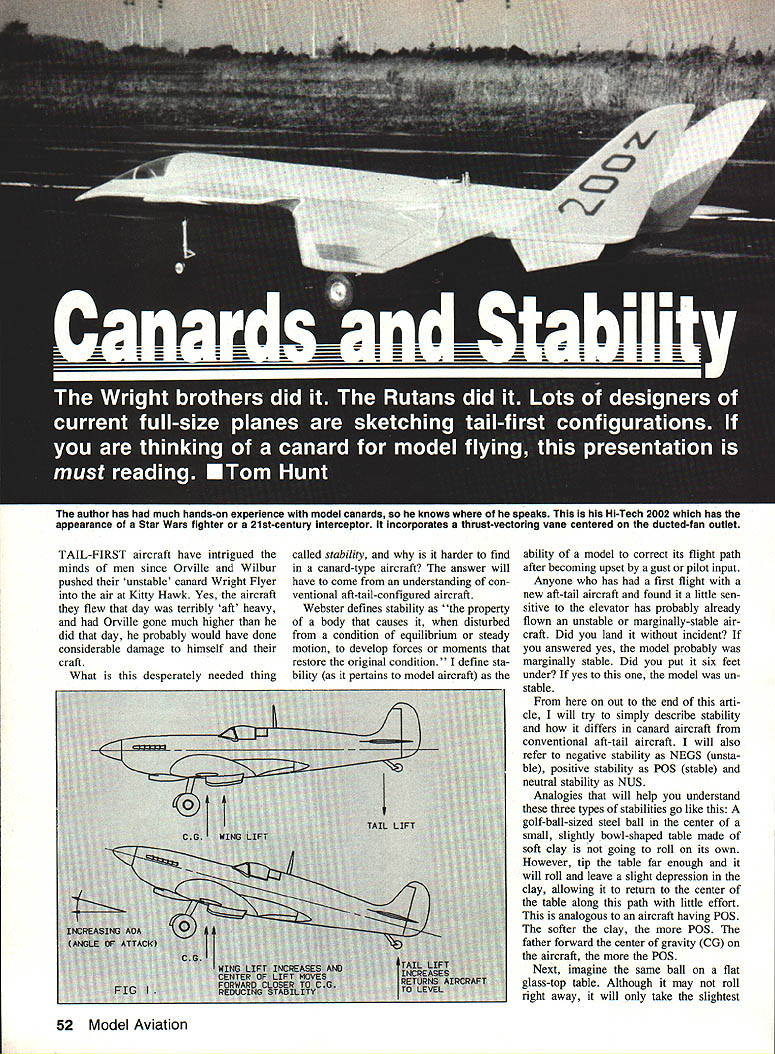
The Wright brothers did it. The Rutans did it. Lots of designers of current full‑size planes are sketching tail‑first configurations. If you are thinking of a canard for model flying, this presentation is must reading.
Tail‑first aircraft have intrigued people since Orville and Wilbur pushed their "unstable" canard Wright Flyer into the air at Kitty Hawk. Yes, the aircraft they flew that day was terribly aft‑heavy, and had Orville gone much higher he probably would have done considerable damage to himself and their craft.
What is this desperately needed thing called stability, and why is it harder to find in a canard‑type aircraft? The answer will have to come from an understanding of conventional aft‑tail‑configured aircraft.
What is stability?
Webster defines stability as "the property of a body that causes it, when disturbed from a condition of equilibrium or steady motion, to develop forces or moments that restore the original condition." I define stability (as it pertains to model aircraft) as the ability of a model to correct its flight path after becoming upset by a gust or pilot input.
Anyone who has had a first flight with a new aft‑tail aircraft and found it a little sensitive to the elevator has probably already flown an unstable or marginally stable aircraft. Did you land it without incident? If yes, the model was probably marginally stable. Did you put it six feet under? If yes to that one, the model was unstable.
From here to the end of this article I will describe stability and how it differs in canard aircraft from conventional aft‑tail aircraft. I will refer to negative stability as NEGS (unstable), positive stability as POS (stable) and neutral stability as NUS.
Analogies that help explain these three types of stability:
- POS (positive stability): Imagine a golf‑ball‑sized steel ball in the center of a small, slightly bowl‑shaped table made of soft clay. The ball will not roll on its own. Tip the table far enough and it will roll and leave a slight depression in the clay, allowing it to return to the center along this path with little effort. The softer the clay, the more POS. The farther forward the center of gravity (CG) on the aircraft, the more POS.
- NUS (neutral stability): The same ball on a flat glass‑top table may not roll right away, but the slightest breeze can set it rolling; it leaves no trail, and its return may continue to oscillate until it finds the edge. With careful, continued input of angle of attack the table could keep the ball near the center with little movement, but at an aft‑most CG the aircraft can behave like the ball on the glass table.
- NEGS (negative stability): The ball on the glass table outside on a gale‑force windy day will not stay on the table. This is analogous to NEGS — a complete lack of stability.
Full‑scale and model aircraft have three axes of stability: longitudinal (elevator upsets stability), lateral (aileron upsets stability) and directional (rudder upsets stability). This article deals with longitudinal stability and control as it pertains to canard aircraft.
Longitudinal stability in aft‑tail aircraft
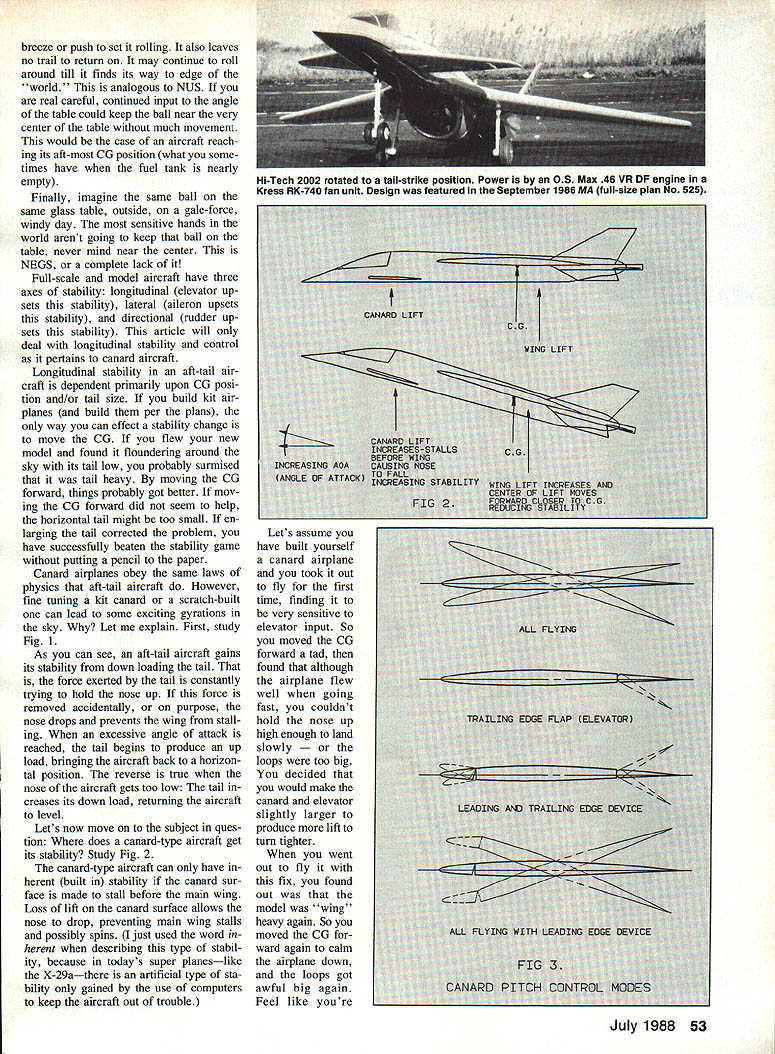
Longitudinal stability in an aft‑tail aircraft depends primarily upon CG position and/or tail size. If you build kit airplanes (and build them per the plans), the easiest way to change stability is to move the CG. If your new model flounders with its tail low, it is probably tail‑heavy; moving the CG forward will usually help. If moving the CG forward does not help, the horizontal tail might be too small. Enlarging the tail can correct the problem without redesigning the aircraft.
Where does a canard get its stability?
Canard airplanes obey the same laws of physics as aft‑tail aircraft. However, fine‑tuning a kit or scratch‑built canard can lead to some exciting gyrations in the sky. Why? Because an inherently stable canard‑type aircraft requires the canard surface to stall before the main wing. Loss of lift on the canard allows the nose to drop, preventing main wing stalls and possible spins.
In modern high‑performance aircraft like the X‑29, computers provide artificial stability to keep the aircraft out of trouble, but most model canards must rely on aerodynamic design and CG placement.
Consider a typical troubleshooting scenario: you build a canard airplane and find it very sensitive to elevator input. You move the CG forward a bit, and the model flies well at speed but you can't hold the nose up enough to land slowly or the loops are too big. You decide to enlarge the canard and elevator to get more lift and tighter turns. On the next flight the model becomes "wing‑heavy" again, so you move the CG forward more — and the loops get even bigger.
Increasing the canard size without changing CG reduces stability but increases control power, making the airplane unmanageable. In some canard designs, a balance between aerobatic performance and good positive stability can be achieved with CG position alone. If everything you try still fails to give the performance you want, consider an aft‑tail design.
Pitch control methods
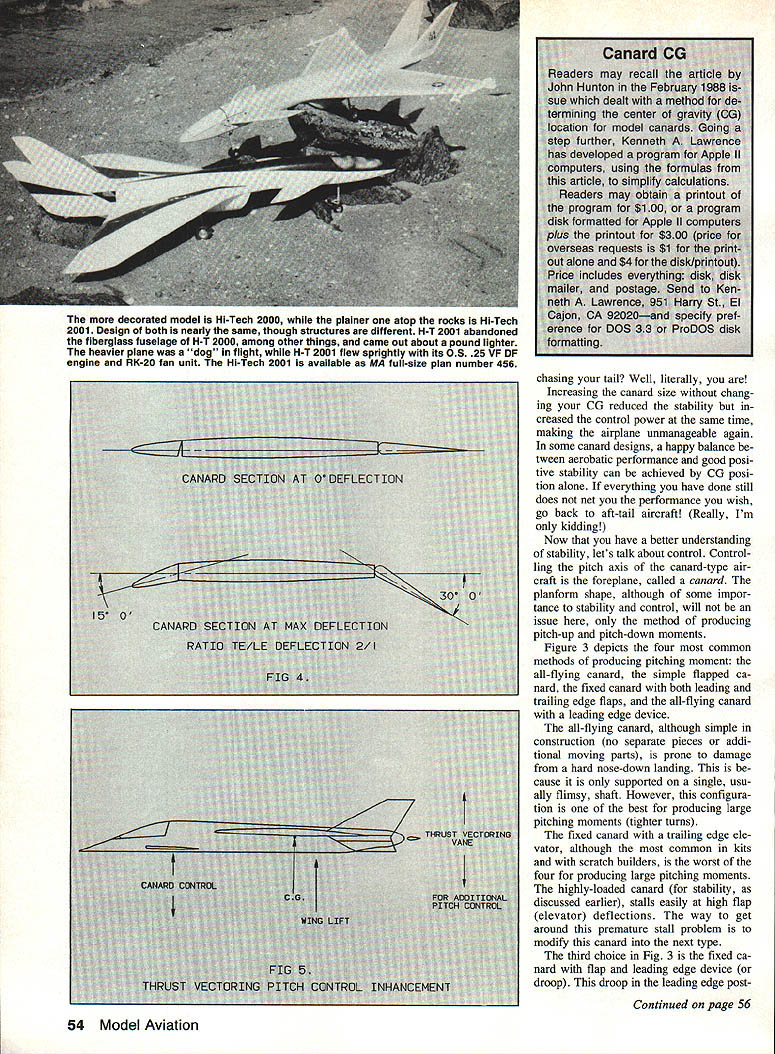
Controlling the pitch axis on a canard‑type aircraft is done by the foreplane (the canard). The planform shape matters, but the primary issue here is the method of producing pitch‑up and pitch‑down moments. Four common methods are:
- All‑flying canard (full‑span control surface)
- Simple in construction (no separate pieces), but prone to damage from a hard nose‑down landing because it is usually supported on a single shaft.
- One of the best for producing large pitching moments (tighter turns).
- Simple flapped canard (fixed planform with a trailing‑edge elevator)
- Most common in kits and scratch builds.
- Worst of the four for producing large pitching moments because a highly loaded canard stalls easily at high elevator deflections.
- Fixed canard with both leading‑edge droop and a trailing‑edge elevator
- Leading‑edge droop postpones canard stall considerably.
- Still, the canard will stall before the main wing because of its relatively smaller size.
- Offers exceptional pitch control and good structural integrity due to a non‑moving center section.
- All‑flying canard with a leading‑edge device
- Best pitch control without very high deflections.
- Structural and aerodynamic drawbacks vary by configuration.
All of these methods have tradeoffs. My personal preference is option 3 because it offers excellent pitch control and structural integrity.
Thrust vectoring
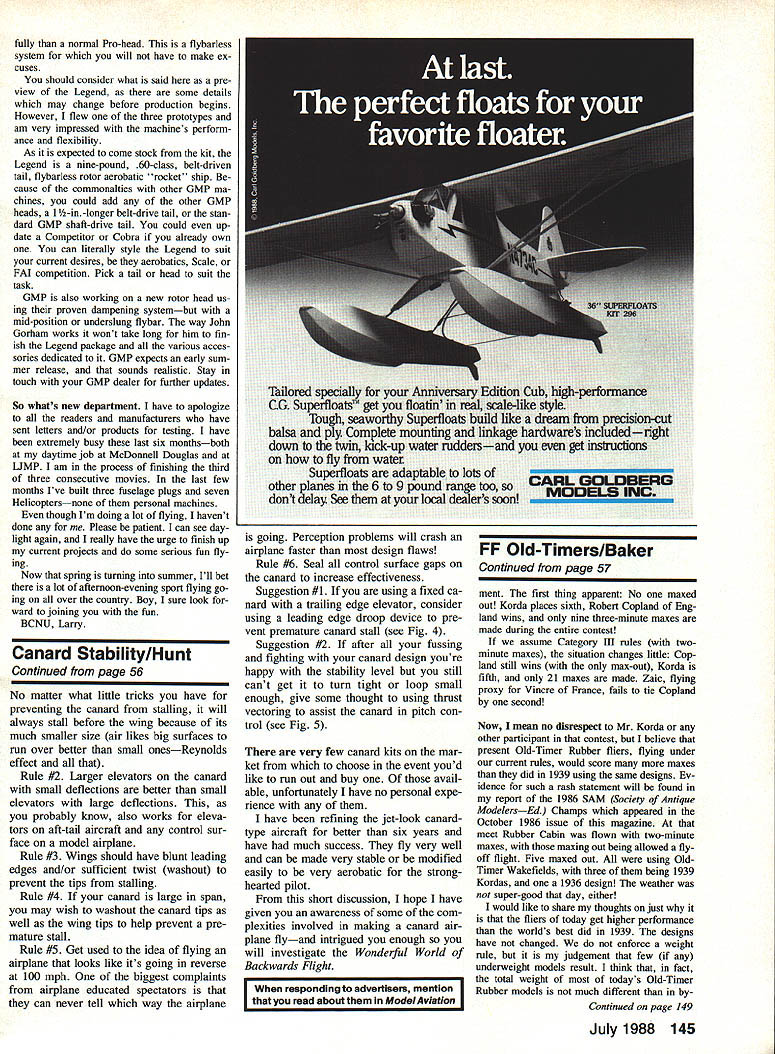
Thrust vectoring uses the high‑energy airflow from the propeller or fan to complement the canard in pitch control. A small vane behind the prop or fan, supported on the engine centerline and mechanically coupled to the canard, moves with canard commands (trailing edge of the vane moves up when the canard commands up). Pilots of close‑coupled Control Line Combat ships will recognize this effect: when the engine quits the ship comes down quickly, and applying elevator cannot keep the nose up at low speed.
Thrust vectoring can save a canard aircraft that finds itself in deep stall. In deep stall the aircraft rarely spins; instead it behaves like a falling maple leaf — it may fall slowly but uncontrollably, upright or inverted, with the wings level. In this condition there is no airflow over the canard to provide pitch control, and without thrust vectoring there is nothing behind the prop or fan to produce a recovery moment. Thrust vectoring is both a complement to the canard for pitch control and an aircraft saver in a deep stall.
Rules and suggestions
Follow these basic rules to make canard airplanes easier and more enjoyable to fly:
- Keep the canard airfoil thick and the leading edge blunt to delay its stall, even though the canard must stall before the wing to provide POS.
- No matter what tricks you use, the canard will usually stall before the wing because of its smaller size (air prefers bigger surfaces—Reynolds effect).
- Larger elevators with small deflections are better than small elevators with large deflections.
- This applies to aft‑tail elevators and any control surface on a model airplane.
- Wings should have blunt leading edges and/or sufficient twist (washout) to prevent tip stalls.
- If your canard has a large span, consider washing out the canard tips as well as the wing tips to help prevent premature canard stall.
- Get used to the idea of flying an airplane that can look like it's going in reverse at 100 mph.
- Spectators educated on conventional airplanes often cannot tell which way a canard is going; perception problems can cause accidents.
- Seal all control surface gaps on the canard to increase effectiveness.
Suggestions:
- If you use a fixed canard with a trailing elevator, consider adding a leading‑edge droop device to prevent premature canard stall.
- If you are happy with stability but still need tighter turns or smaller loops, consider using thrust vectoring to assist the canard in pitch control.
Closing thoughts
There are very few canard kits on the market; of those available I have no personal experience with them. I have been refining jet‑look canard‑type aircraft for more than six years with much success. They fly very well and can be made very stable or modified to be very acrobatic for the more adventurous pilot.
I hope this discussion has increased your awareness of the complexities involved in making a canard airplane fly — and intrigued you enough to investigate the wonderful world of backward flight.
Transcribed from original scans by AI. Minor OCR errors may remain.

