
Control Line: Scale
Mike Stott
EVER SINCE I flew my Tigercat at the 1974 World Championships at Lakehurst, NJ, I've had quite a few letters asking me about the electrical control system that I used in it. On the units currently being used in competition here's a list of the positions taken by models using the control system:
- 4th place — 1974 World Champs
- 9th place — 1974 World Champs
- 1st place — 1974 Nats (Stand-off Scale)
- 2nd place — 1974 Nats (Scale)
- 1st place — 1975 Nats (Scale)
- 2nd place — 1975 Nats (Scale)
After flying CL Scale for several years I figured there had to be a more dependable method to control the various options desired in flying your model. So, I came up with an idea that might work. This was to transmit electrical impulses through the two existing flying lines (insulated flying lines). I presented this idea to several people who produced radio-control equipment and they told me they did not feel it was a feasible idea. But feeling my idea would work and being a stubborn person by nature, I still pursued it.
At the 1973 Nats in Oshkosh, WI, I talked to a good friend of mine, Ken Wilson of Shawnee, KS; who is an authorized service center for EK-logictrol. I got Ken to listen to my ideas which were to take an existing radio control unit and remove the RF section. This is the unit that produces the actual radio signals. I wanted Ken to take out the RF and just transmit electrical impulses, not radio impulses, down through the two insulated flying lines. These impulses would be received by a decoder mounted in the model. This decoder has the same function as a receiver in an RC model. You would then be able to use the regular servos as in a radio control unit. Ken became very interested and saw no reason why this shouldn't work.
On returning from the Nats I was faced with the problem of finding heavy insulated flying lines. But after checking around you'd be surprised at what a person can find. I got the material for the lines and made a set and sent them off to Ken so he could start work on the unit.
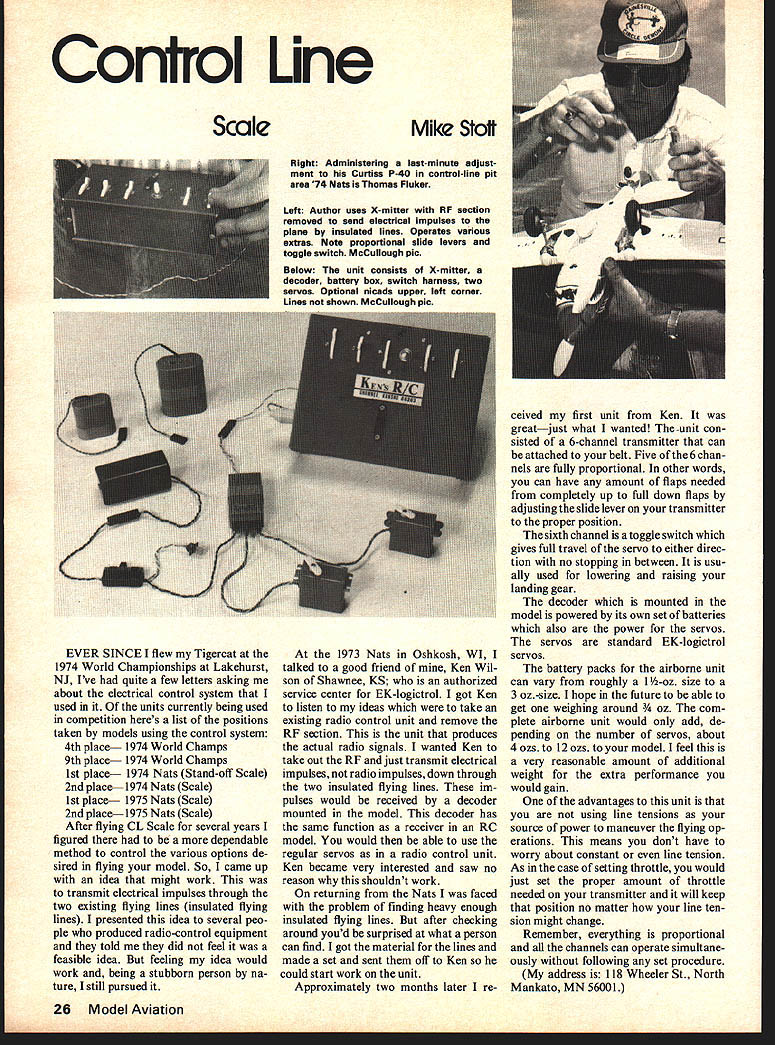
Approximately two months later I received my first unit from Ken. It was great—just what I wanted! The unit consisted of a 6-channel transmitter that can be attached to your belt. Five of the 6 channels are fully proportional. In other words, you can have any amount of flaps needed from completely up to full down flaps by adjusting the slide lever on your transmitter to the proper position.
The sixth channel is a toggle switch which gives full travel of the servo to either direction with no stopping in between. It is usually used for lowering and raising your landing gear.
The decoder which is mounted in the model is powered by its own set of batteries which also are the power for the servos. The servos are standard EK-logictrol servos.
The battery packs for the airborne unit can vary from roughly a 1-1/2-oz. size to a 3-oz. size. I hope in the future to be able to get one weighing around 3/4 oz. The complete airborne unit would only add, depending on the number of servos, about 4 ozs. to 12 ozs. to your model. I feel this is a very reasonable amount of additional weight for the extra performance you would gain.
One of the advantages to this unit is that you are not using line tensions as your source of power to maneuver the flying operations. This means you don't have to worry about constant or even line tension. As in the case of setting throttle, you would just set the proper amount of throttle needed on your transmitter and it will keep that position no matter how your line tension might change.
Remember, everything is proportional and all the channels can operate simultaneously without following any set procedure.
(My address is: 118 Wheeler St., North Mankato, MN 56001.)
Transcribed from original scans by AI. Minor OCR errors may remain.

