
Electronics
By Eloy Marez
THE MAIL from the initial columns has been extensive. Thanks for your support, and for giving me an idea of the things that interest you. All mail has and will be answered personally, and that which I consider to be of general interest will be answered here in the pages of MA.
Surprisingly enough, the majority of questions have not been about batteries, as they have in the past, but about servos. Dick Lehmann, Wausau WI, condensed most of the notes in his letter:
"Please write a column discussing servos. How do they work? What are the differences between the different models? Why are some so much more expensive than the others? Maybe I read the wrong magazines, but I have yet to see a good article on servos."
Well, Dick, one article on servos coming up!
Cost and quality
There is little doubt that, with the exception of items marketed and bought for show-off appeal, quality and reliability cost more. You can get a Timex for $10, or a Rolex for $10,000—both tell time. You can buy a Fuji camera for $29.95, or a Nikon for $2,995—both take pictures. But there are differences.
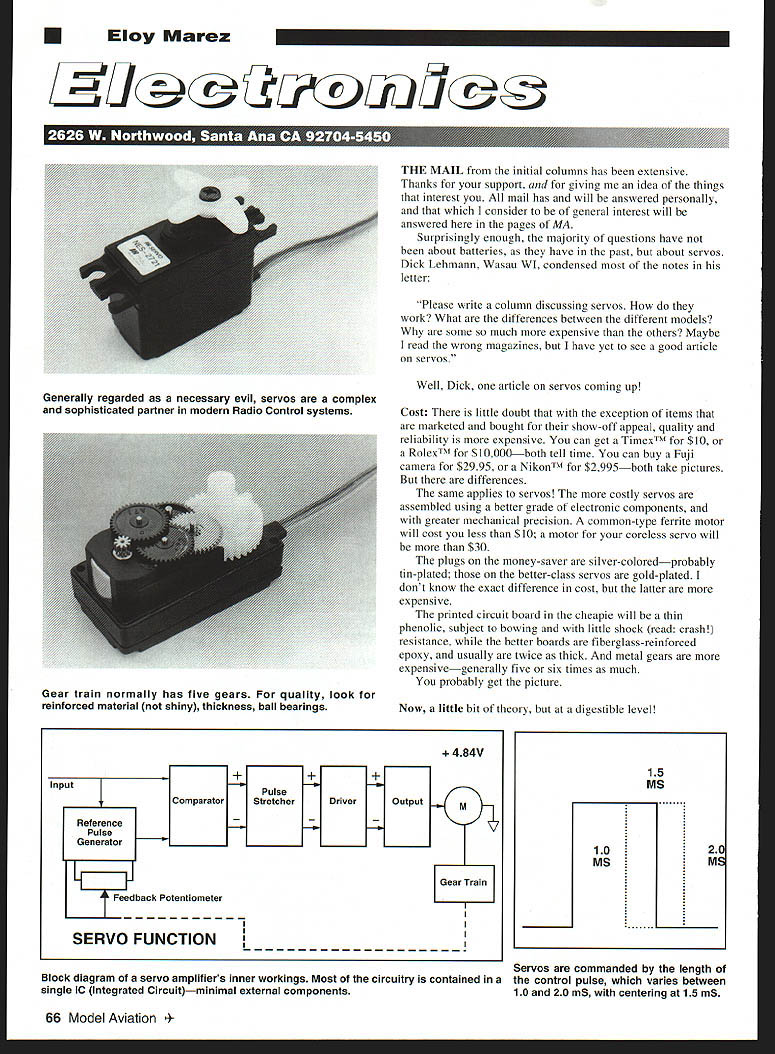
The same applies to servos. The more costly servos are assembled using a better grade of electronic components and with greater mechanical precision.
- Motors: A common ferrite motor may cost less than $10; a motor for a coreless servo can be more than $30.
- Connectors: Cheaper plugs are tin-plated (silver-colored); better-class servos often use gold-plated plugs.
- Printed circuit boards: Cheap servos use thin phenolic boards that can bow and have little crash resistance. Better boards are fiberglass-reinforced epoxy and usually thicker.
- Gears: Metal gears are more expensive—generally five or six times the cost of plastic gears.
- Bearings: Use of ball bearings adds cost but improves operation.
You probably get the picture.
Basic theory — what a servo is
An RC (radio control) servo is a sophisticated electromechanical device in which each stage must mate with the others precisely to avoid deterioration of performance.
We can consider the servo as three separate entities:
- The motor
- The gear train
- The electronics
The ultimate job of the servo is to convert electrical energy from the battery into physical motion.
Motors
The motor is the last link in the chain; its quality determines the power output and efficiency of the servo. Simply put: the more current consumed, the greater the muscle power available at the servo arm.
The common motor is the ferrite permanent-magnet DC motor. Its moving part is a steel armature wrapped with turns of wire, rotating between a pair of magnets. In RC servos there are three- and five-pole motors (referring to the number of windings). The five-pole motor runs smoother and at full speed will develop slightly more power. However, in a servo the motor rarely runs at full speed: the heavy armature takes time to pick up speed and wants to coast once power is cut.
Coreless motors can be thought of as made inside-out: the armature is a coil of wrapped wire without the steel center. The magnets are fixed within the armature, which spins around them. Advantages of coreless motors:
- Lighter armature speeds up faster and stops quicker.
- Far more precise in operation.
- More expensive.
Gear train and potentiometer (pot)
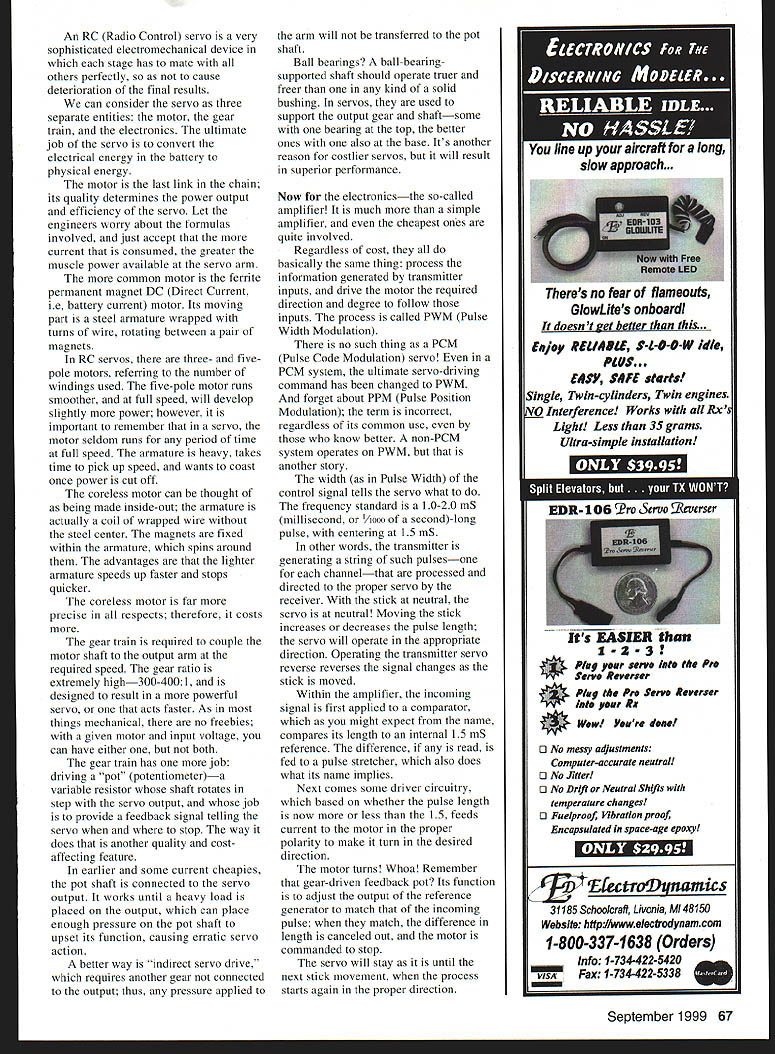
The gear train couples the motor shaft to the output arm at the required speed. Gear ratios are extremely high—typically 300–400:1—and are designed to produce either more power or faster action. With a given motor and input voltage, you can have either more power or more speed, but not both.
The gear train also drives a potentiometer (pot): a variable resistor whose shaft rotates in step with the servo output and provides a feedback signal telling the servo where to stop.
- In cheaper servos, the pot shaft is connected directly to the output. Heavy loads on the output can place pressure on the pot shaft, upsetting its function and causing erratic action.
- A better approach is an indirect servo drive, where another gear drives the pot independently of the output, so pressure on the arm does not transfer to the pot shaft.
Ball bearings
Ball-bearing-supported shafts operate truer and freer than those using solid bushings. Servos may use one bearing at the output shaft; better servos use bearings at both top and base of the output gear/shaft. This is another reason for higher cost but gives superior performance.
Electronics — the amplifier and PWM
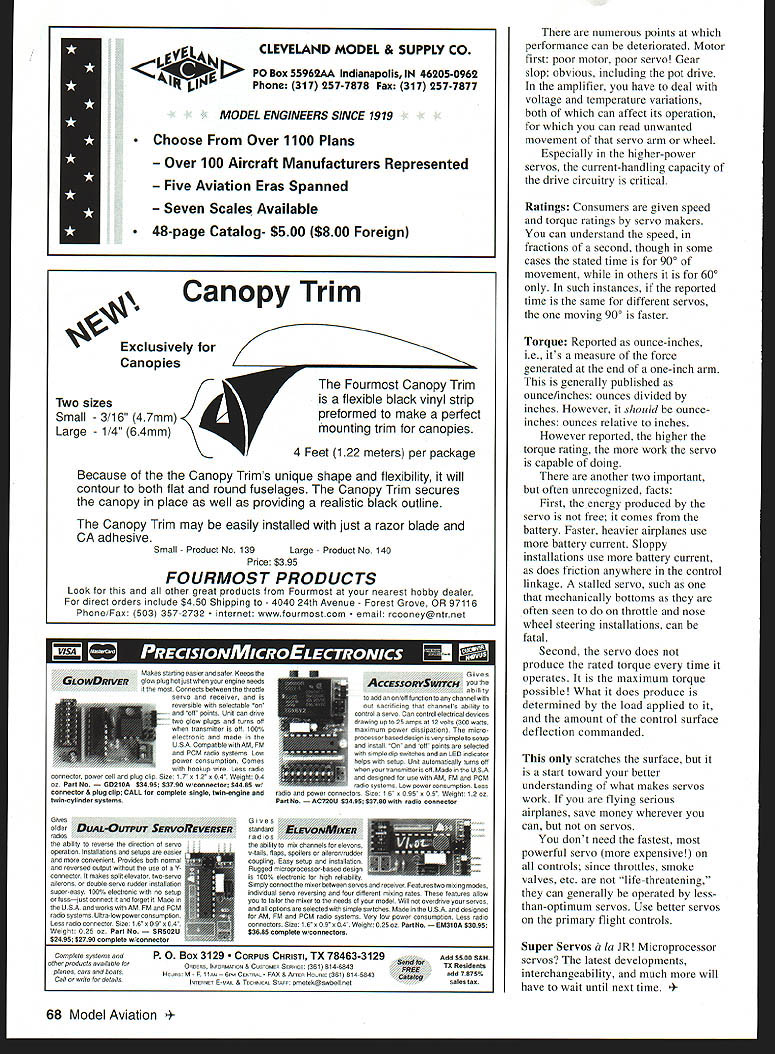
The electronics are often called the amplifier, but they are more than a simple amplifier. Regardless of cost, servos all do basically the same thing: they process the information from the transmitter and drive the motor in the required direction and amount. The process is called PWM (Pulse Width Modulation).
- There is no such thing as a PCM (Pulse Code Modulation) servo. Even in PCM systems, the ultimate servo-driving command has been converted to PWM.
- The term PPM (Pulse Position Modulation) is commonly used but incorrect for the servo command in this context.
Pulse width tells the servo what to do. The standard pulse width is typically 1.0–2.0 milliseconds, with centering at 1.5 ms. The transmitter generates a string of such pulses—one for each channel—that are processed and directed to the proper servos by the receiver. With the stick at neutral, the servo is at neutral; moving the stick increases or decreases the pulse length, and the servo moves accordingly. Using the transmitter servo reverser reverses the signal changes as the stick is moved.
Inside the amplifier:
- The incoming signal is applied to a comparator, which compares its length to an internal 1.5 ms reference.
- The difference is read and fed to a pulse stretcher.
- Driver circuitry then feeds current to the motor with the proper polarity and amount based on whether the pulse is longer or shorter than the 1.5 ms reference.
As the motor turns, the feedback pot adjusts the output of the reference generator to match the incoming pulse. When they match, the difference is canceled and the motor is commanded to stop. The servo holds that position until the next stick movement.
Points of performance deterioration
Numerous factors can degrade performance:
- Poor motor quality.
- Gear slop or backlash (including poor pot drive).
- Voltage and temperature variations affecting amplifier performance, leading to unwanted movement of the servo arm or wheel.
- In higher-power servos, current-handling capacity of the drive circuitry is critical.
Ratings: speed and torque
Manufacturers publish speed and torque ratings.
- Speed: Given in fractions of a second. Note that some speeds are reported for 90° of movement while others are for 60°. If two servos have the same reported time but one is for 90° and the other for 60°, the 90° unit is faster.
- Torque: Reported as ounce-inches, a measure of force at the end of a one-inch arm. It is generally given as ounces divided by inches; however reported, a higher torque rating means the servo can do more work.
Two important but often overlooked facts:
- The energy produced by the servo comes from the battery. Faster, heavier airplanes use more battery current. Sloppy installations and friction in control linkages increase current draw. A stalled servo (for example, one that bottoms out mechanically) can be fatal to battery life and operation.
- The servo does not produce rated torque every time; the rating is the maximum possible. The actual torque produced depends on the load and the commanded control-surface deflection.
Practical advice
This only scratches the surface, but it starts your understanding of what makes servos work. If you fly serious airplanes, save money where you can, but not on servos. You don't need the fastest, most powerful (and most expensive) servo on all controls. Throttles, smoke valves, etc., which are not life-threatening, can usually be operated by less-than-optimum servos. Use better servos on primary flight controls.
Looking ahead
Super servos, microprocessor servos, interchangeability, and the latest developments will have to wait until next time.
Transcribed from original scans by AI. Minor OCR errors may remain.

