
Far-out Use of RC
- Don Edberg
Introduction
As it so often has been in the past, RC once again came to the aid of the high‑tech researcher. In this instance, I used RC to operate test equipment inside a NASA vacuum chamber. Maybe someday we'll see a descendant of this setup operating in the vacuum of outer space.
This is the story of how I used skills and knowledge gained from years of modeling to carry out engineering research in a most efficient way. I have been flying RC sailplanes for over 13 years, and this was among the most challenging and unique uses of RC that I've run across.
Background: what is damping and why it matters
My dissertation advisor at Stanford suggested I investigate damping. Damping is the quality in materials that dissipates vibrational energy. For instance, when you ring a bell the ringing eventually stops; in a vacuum it may ring longer. In simplified thermodynamic terms, you can't get something for nothing—no material is perfect, and all will dissipate energy so vibrations eventually stop.
Damping is especially important for large, flimsy space structures. If a space shuttle docks a bit hard with a space station, shock waves will travel through the station. If damping is very low, the station could vibrate for a long time, interfering with observations and delicate experiments. To design and build such structures, we need to know how materials damp vibrations in the vacuum of space.
Simulating space conditions: vacuum and free‑fall
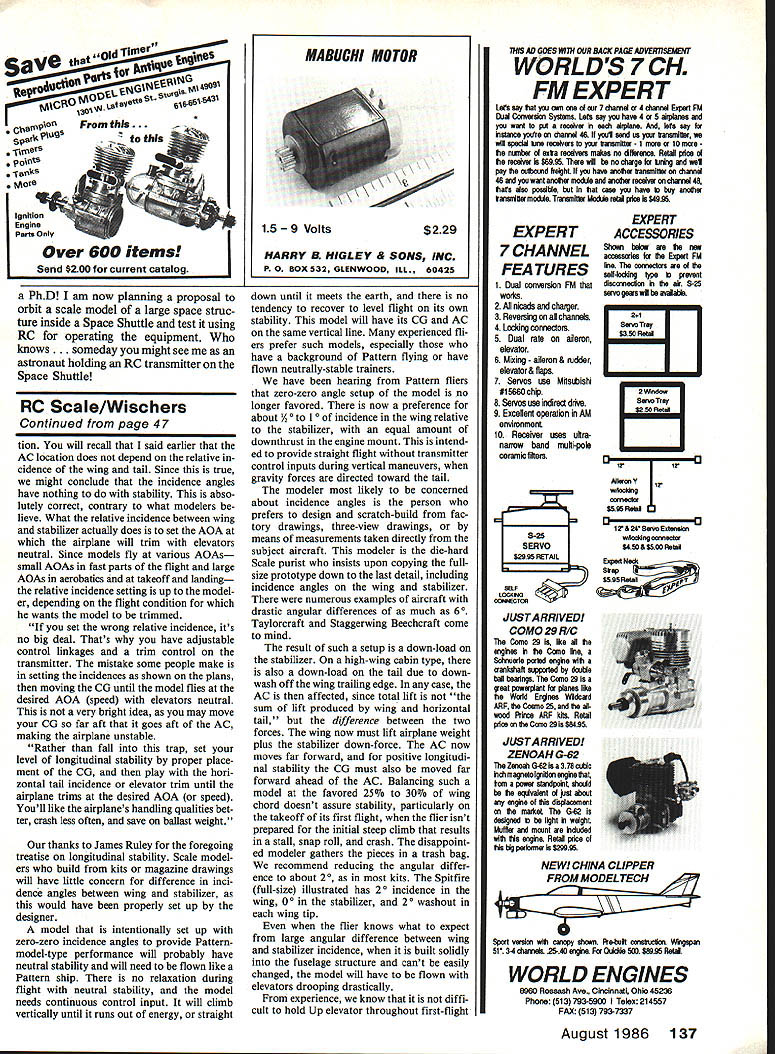
To make measurements applicable to space structures, I wanted to test materials under vacuum and zero‑gravity (free‑fall) conditions. The easiest to simulate was vacuum: I got permission to use a large vacuum chamber at the NASA Ames Research Center. The chamber has a floor 10 feet square, an eight‑foot ceiling, and can be evacuated to about 99.5% vacuum—good enough for our purposes.
Simulating zero gravity was harder. I found work at MIT that simulated zero gravity by launching specimens into free‑fall. Their technique looked promising, but they used wires attached to the specimen to get data. Wires dragging during free‑fall would alter the vibrations I wanted to measure, so I decided to do it differently.
Telemetry and electronics
I designed a miniature telemetry system to transmit vibrational data back to a receiver. I learned some electronics and printed‑circuit‑board work, and I modified a miniature transmitter originally designed for medical implantation to send vibrational information.
Key details:
- Printed‑circuit board with components and two 20 mAh Ni‑Cd batteries.
- Continuous operation of about eight hours.
- Total mass approximately 30 grams (about one ounce).
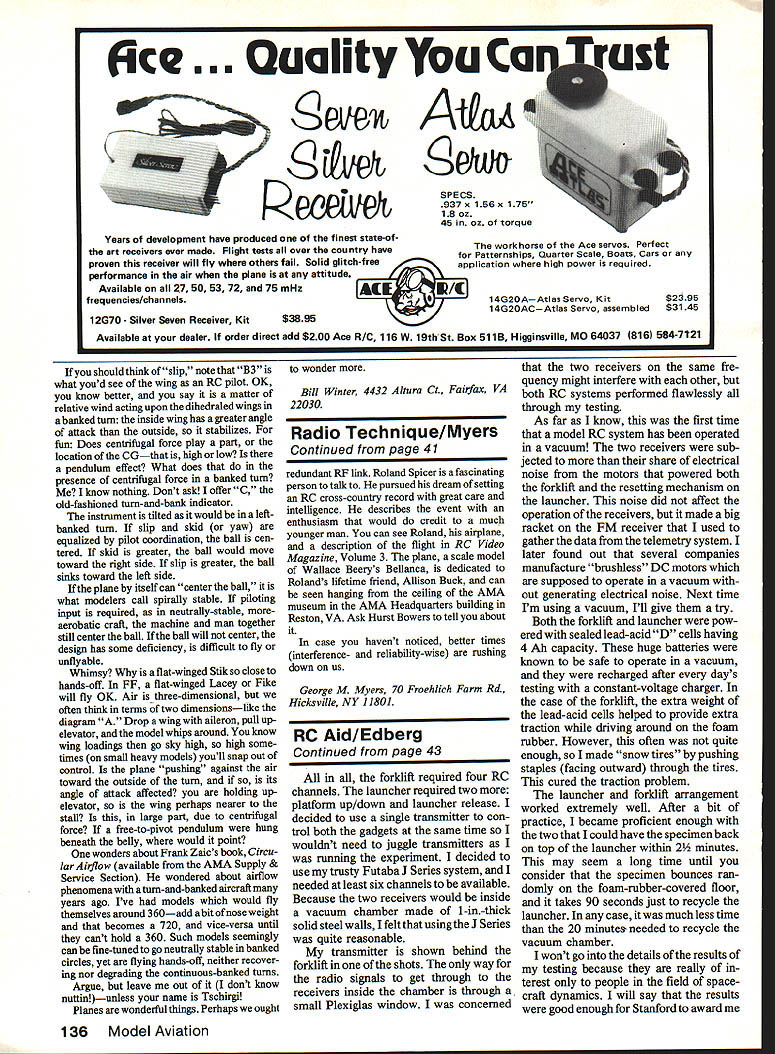
Spring‑powered launcher
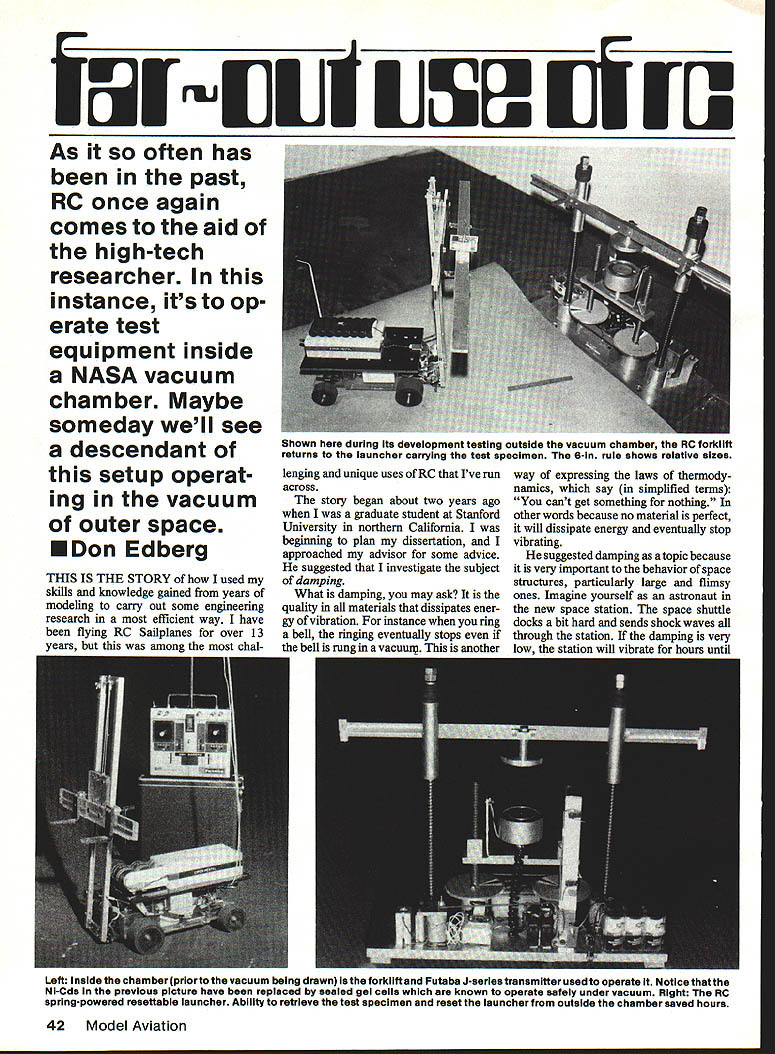
To put specimens into free‑fall, I built a spring‑powered launcher modeled after the MIT design with some simplifications. The launcher uses two vertical guide rods with springs around the moving part. The launcher is placed beneath the specimen; the top springs are compressed and the moving part is released to launch the specimen upward into free‑fall. In the size of the chamber, this yields about 1.4 seconds of free‑fall—enough to get reasonable data.
Remote resetting mechanism and RC forklift
To maximize throughput I needed a way to reset the experiment without opening the vacuum chamber (opening and repumping the chamber took over 20 minutes). With my RC background, I chose to build mechanisms that could be operated remotely.
Remote resetting mechanism:
- A moving platform holding a powerful electromagnet raises and lowers by RC to reset the launcher.
- To reset: raise the platform until the electromagnet touches the bottom of the launcher's moving plate, turn the electromagnet on, and lower the platform to compress the springs. Once the springs are compressed the proper amount, stop the platform, turn the electromagnet off, and the launcher is ready to be released.
Getting the specimen back on the launcher required a compact robotic solution. My friend Brian Chan designed a miniature RC forklift as a project for his design class.
The forklift has four functions:
- Forward and reverse
- Steering
- Lift up and down (to raise the specimen to the top of the launcher)
- "Kneeling" (tilt the lift forward so the arms can fit under the specimen on the foam‑covered floor)
The floor of the vacuum chamber was covered with foam rubber to protect the specimen and telemetry system when they landed, so the kneeling function was essential.
Radio control and operation in vacuum
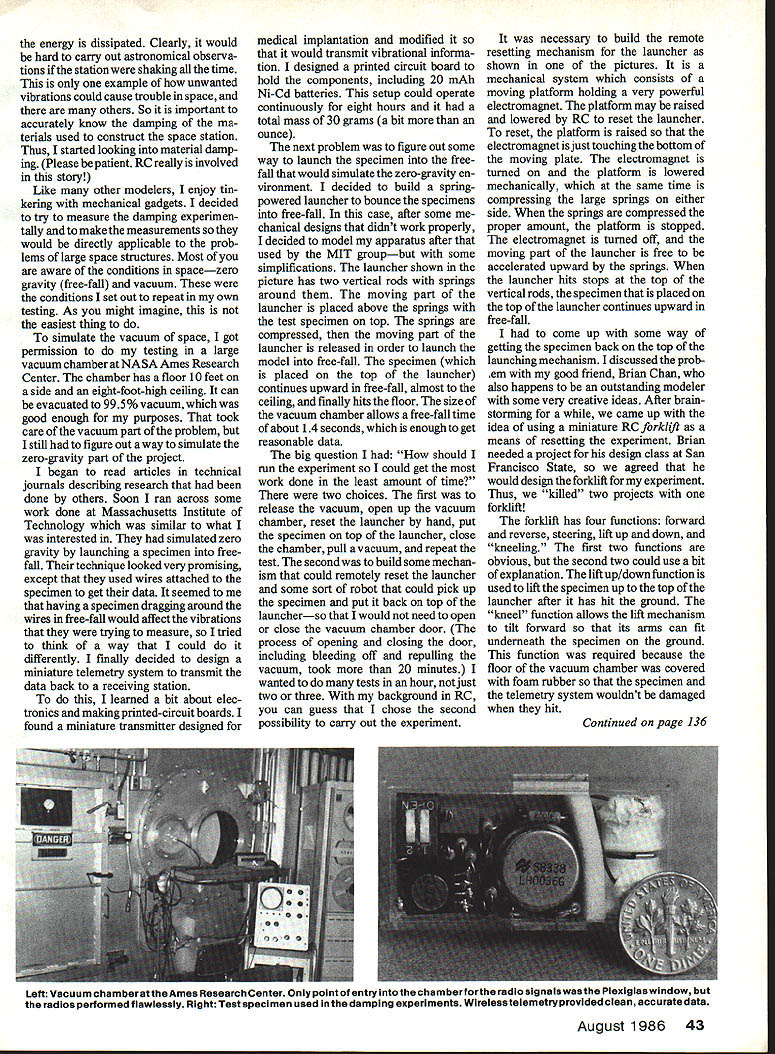
All of the fork‑lift and launcher functions were RC‑controlled. The forklift required four channels; the launcher required two more (platform up/down and launcher release). I used a single transmitter (a Futaba J‑Series system) to control both devices simultaneously, so I needed at least six channels available.
The two receivers were inside the vacuum chamber, behind 1‑inch solid steel walls. Radio signals reached them through a small Plexiglas window. I was concerned about interference with two receivers on the same frequency, but both systems performed flawlessly during testing.
This was, as far as I know, the first time a model RC system was operated in vacuum. The receivers were subjected to substantial electrical noise from the motors driving the forklift and the reset mechanism. The noise didn't affect receiver operation, but it did cause a lot of interference on the FM receiver used to gather telemetry. In future tests I planned to try brushless DC motors, which are designed to run in vacuum with less electrical noise.
Power and practical details
Both the forklift and the launcher were powered with sealed lead‑acid "D" cells (4 Ah capacity). These batteries are safe to operate in vacuum and were recharged after each day's testing with a constant‑voltage charger. The extra battery weight helped traction on the foam rubber. To further reduce slipping, I added a 3/32‑in. brass "nose" pressed against the floor by the fork to increase traction.
With practice I could recover and place the specimen back on the launcher within about two and a half minutes. The specimen often bounced randomly on the foam‑covered floor and sometimes took up to 90 seconds to collect, but this cycle time was still far faster than opening and repressurizing the chamber.
Results and future work
I won't go into the technical details of the damping results here, as they're of most interest to spacecraft dynamics specialists. I will say the results were sufficient for Stanford to award me a Ph.D.
I'm now planning a proposal to orbit a scale model of a large space structure inside a Space Shuttle and test it using RC to operate the equipment. Who knows—maybe someday you'll see me holding an RC transmitter on the Space Shuttle.
Transcribed from original scans by AI. Minor OCR errors may remain.

