

One Whole Day And Then Some
Maynard Hill
America's "record buster" did it again!
This article describes how an 11-pound model was kept aloft for 40–50 hours and discusses technical choices that made the flights possible. The FAI rules about radio-controlled aeromodel records that most affect design are simple:
- The model, with fuel, shall not weigh more than five kilograms (11 pounds).
- The engine displacement of powered models shall not exceed 10 cubic centimeters (0.61 cubic inches).
There used to be a third, non-technical rule:
- Assistant pilots are not permitted.
That rule has recently been changed: assistant pilots are now allowed to fly up to 49% of the time.
I enjoy the first two rules because they create tough, fun technical challenges. The assistant-pilot rule, however, used to be useful for generating humor when people asked the inevitable questions: "How do you stay awake that long?" and "Do you drink coffee?" My usual joke was, "You steer with your right hand and do the less important things with your left hand."
Staying awake isn't a real problem if you've been working toward the goal for over a year, crashed and rebuilt several models, and have hundreds of hours of help from friends. The adrenaline keeps you awake. Headaches? Yes. Sleepy at the switch? No.
Below are some of the technical secrets behind the records. Some of the information may help Sunday fun-fliers.
Engine and Model
The engine is an O.S. FS-60 four-stroke (introduced about 1978) with a displacement of 9.95 cc—just under the 10 cc FAI limit. It was modified with a flywheel and a magneto from a Maloney 100 engine to provide spark ignition. The supplied carburetor was replaced with one from an O.S. .10 two-stroke. Hundreds of hours of testing of carburetors, engine modifications, and fuel mixture yielded fuel-consumption figures ranging from about 1.2 ounces per hour at minimum throttle to about 2.4 ounces per hour at wide-open throttle (WOT).
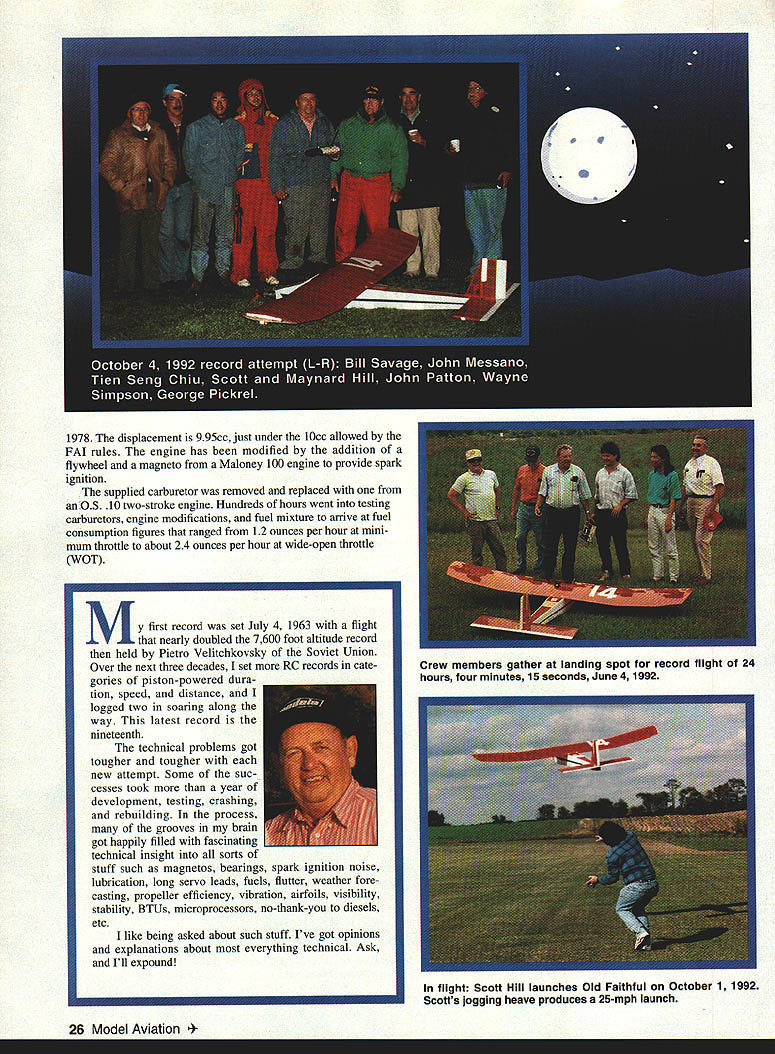
My first record was set July 4, 1963 (an altitude record). Over the next three decades I set more RC records in piston-powered duration, speed, distance, and soaring. This latest record was the nineteenth. Many attempts required more than a year of development, testing, crashing, and rebuilding, and taught me about magnetos, bearings, spark-ignition noise, lubrication, long servo leads, fuels, flutter, weather forecasting, propeller efficiency, vibration, airfoils, visibility, stability, BTUs, microprocessors, and more.
Fuel and Lubricant
- On the recommendation of Tien Seng Chiu, we used Coleman Camp Stove Fuel in place of automobile or aviation gasoline. Coleman fuel burns much cleaner, is less critical on needle setting, and has a slightly different energy and density characteristic than gasoline. It may run a little longer and make a little different power output; it is more expensive and probably not worth it for sport flying.
- The lubricant used with this fuel was polyisobutylene (PIB), commercially Indopol L-50 (Amoco). PIB does not crack into carbon or tar. After hundreds of hours on Coleman–PIB fuel, the inside of the O.S. FS-60 appeared almost pristine: no carbon on the plug and no tar or varnish on the sleeve and piston.
- PIB is not soluble in alcohol, so you cannot make glow fuel with it. It mixes fine with gasoline or Coleman fuel, but the exhaust leaves a sticky film on the airframe that is difficult to wash off; gasoline is required for removal.
Fuel mixture: 114 fl oz of Coleman Stove Fuel plus 14 fl oz of polyisobutylene to make one gallon (128 fl oz). Note: this O.S. FS-60 runs only about 3,900 rpm at WOT; the suitability of PIB for high-rpm two-stroke engines is unknown.
Propeller and Wing
- Propellers: 16 x 10 wooden props purchased at hobby shops and reworked to narrow-bladed, thin-airfoil types; both diameter and pitch dimensions were reduced by about 30%. I prefer long span and high aspect ratio on propeller blades.
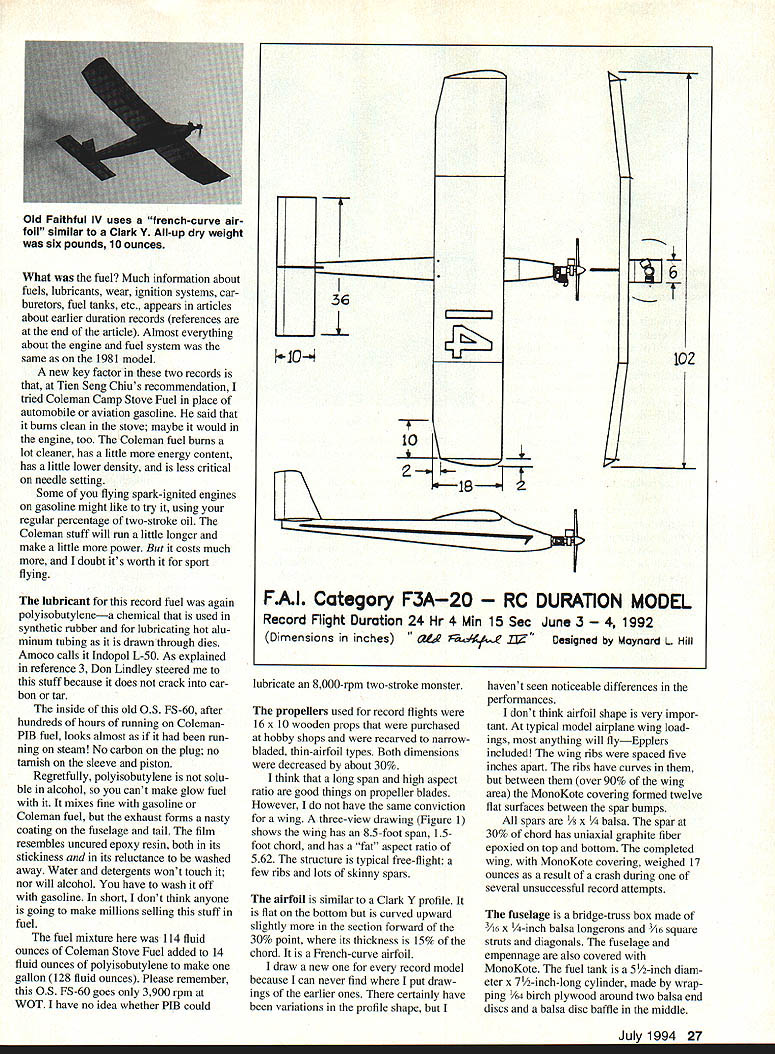
- Wing: span 8.5 ft, chord 1.5 ft, aspect ratio 5.62. The airfoil is similar to a Clark Y (flat bottom, slight upward curve forward of 30% chord; thickness about 15% chord). Ribs were spaced 5 in apart; between ribs the covering formed relatively flat surfaces. Spars are 1/8 x 3/4 in balsa with uniaxial graphite fiber epoxyed to the spar at 30% chord. The completed wing (after a crash) weighed 17 oz.
- I do not believe airfoil variations made a noticeable performance difference for these models; typical model wings tend to "load themselves."
Fuselage, Tank, and Weights
- Fuselage: bridge-truss box of 3/16 x 1/4 in balsa longerons and 3/16 in square struts and diagonals, covered with MonoKote.
- Fuel tank: 5-1/2 in diameter by 7-1/2 in long cylinder, made from birch plywood wrapped around balsa end discs with a balsa baffle; painted inside with epoxy and externally coated with fiberglass. A check valve pressurizes the tank from a crankcase line, forcing fuel to a float-chamber regulator behind the firewall.
- Weights: dry model fresh from the drawing board weighed 6 lb 10 oz. Engine and propeller weighed 2 lb 4 oz. Control system weighed 15 oz. The airframe alone weighed 3 lb 6 oz prior to a May 20 crash.
- Despite its light weight, the model was strong: tested to inside loops near 3 g and steep dives up to about 75 mph.
Control and Telemetry
The airborne and ground systems form an integrated package that serves as receiver, control system, and air-data generator. The system is proprietary and complex; below is a basic description.
General
- Both the hand-held control transmitter and the airborne receiver use Motorola MC68HC11 microprocessors.
- The control transmitter operates on a ham-band frequency of 442.0 MHz and generates a special PCM code providing six channels of proportional control.
- Discrete toggle switches operate wingtip lights, engage a solid-state (Watson) yaw-rate gyro for wing leveling, and connect the rudder servo to a direction-finding (DF) receiver aboard the model.
Direction-Finding (DF) Steering
- The DF receiver steers the model toward a ground beacon (a ham-band walkie-talkie on 449 MHz) placed upwind of the control station. When working, the DF causes the model to circle overhead, reducing the need for continuous visual tracking by the pilot. In strong turbulence or unfavorable winds, manual intervention is still required.
Airborne Electronics
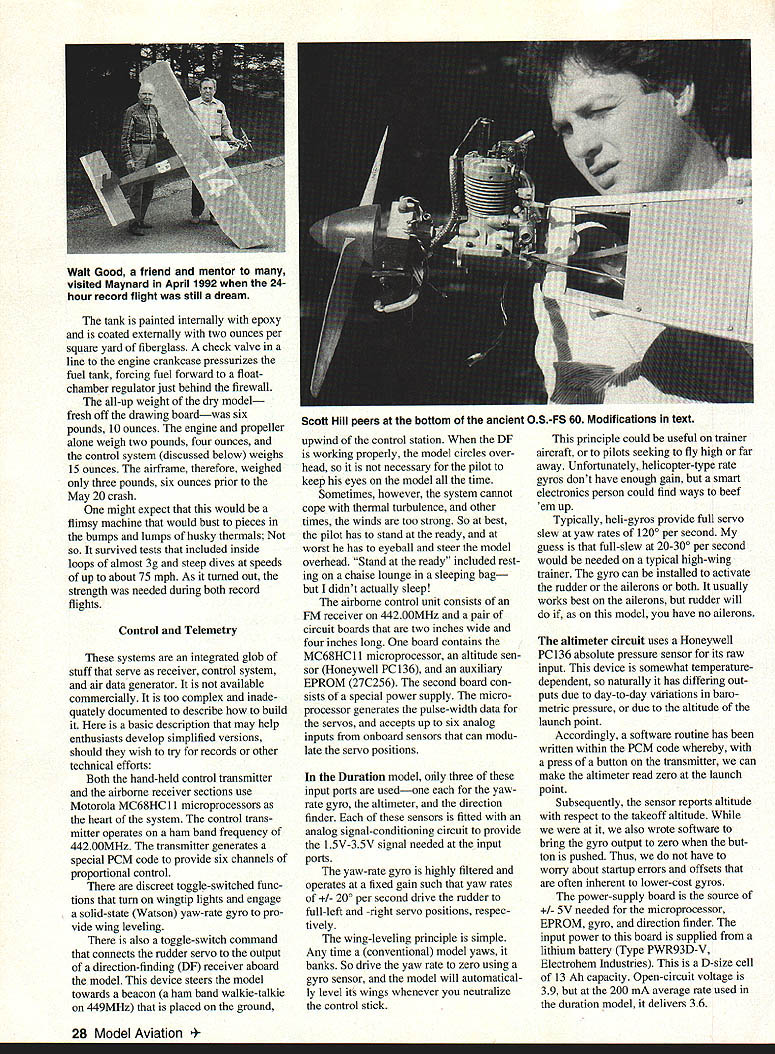
- Airborne unit: FM receiver on 442.00 MHz and two circuit boards (about 2" x 4" each).
- One board: MC68HC11 microprocessor, Honeywell PC136 absolute-pressure altimeter sensor, and an auxiliary 27C256 EPROM.
- Second board: special power supply (dc-to-dc converter).
- The microprocessor generates pulse-width servo data and accepts up to six analog inputs from onboard sensors that can modulate servo positions. On the duration model, three input ports are used: yaw-rate gyro, altimeter, and direction finder. Each sensor has analog signal conditioning to provide 1.5–3.5 V signals to the microprocessor inputs.
- Yaw-rate gyro: highly filtered with fixed gain; yaw rates of ±20°/s drive the rudder to full-left/full-right positions. The principle: any yaw produces a bank; drive yaw rate to zero and the model automatically levels its wings. This can be useful for trainers or long-range flights. Helicopter gyros generally lack sufficient gain for this application, but could be modified.
- Altimeter: uses Honeywell PC136; temperature-dependent so an altitude-drift calibration is done at launch. Software allows a button press on the transmitter to zero the altimeter at takeoff altitude and to zero gyro output for startup offset correction.
- Power: primary input from a lithium battery (PWR93D-V, Electrochem Industries)—a D-size cell of 13 Ah capacity. Open-circuit voltage ~3.9 V; at the ~200 mA average load it supplies ~3.6 V. A dc-to-dc converter produces ±5 V rails for electronics. The altitude sensor and DF receiver have separate supplies for safety. Final failure mode tends to be a fried power-supply regulator.
- Servos: Four Futaba S133 servos are powered from the same lithium battery. They run slowly at the lower voltage but that is acceptable for this slow model.
- Endurance: the entire airborne system (servos, receiver, microprocessors, blinking lights, DF, and gyro) could run about 60 hours from one of these four-ounce lithium batteries. They are expensive (~$70 each at the time) and not rechargeable. Voltage is temperature-sensitive (e.g., ~3.0 V at 32°F under load), so cold-weather performance is a concern.
Telemetry and Ground System
- Telemetry transmitter: postage-stamp-sized 20 mW transmitter mounted in the vertical fin transmitting FM PCM data in the 2-meter ham band (146.5 MHz).
- Ground receive: data is received, decoded, and displayed on a laptop (Tandy 1100FD). Software decodes the PCM stream for display and stores data on floppy disk for postflight analysis.
- Ground equipment power: a 12 V gel cell powers the downlink gear for about five hours; for record flights it is connected to a charger and a 110 V generator. The ground data system is housed in a metal suitcase and weighs about 15 lb.
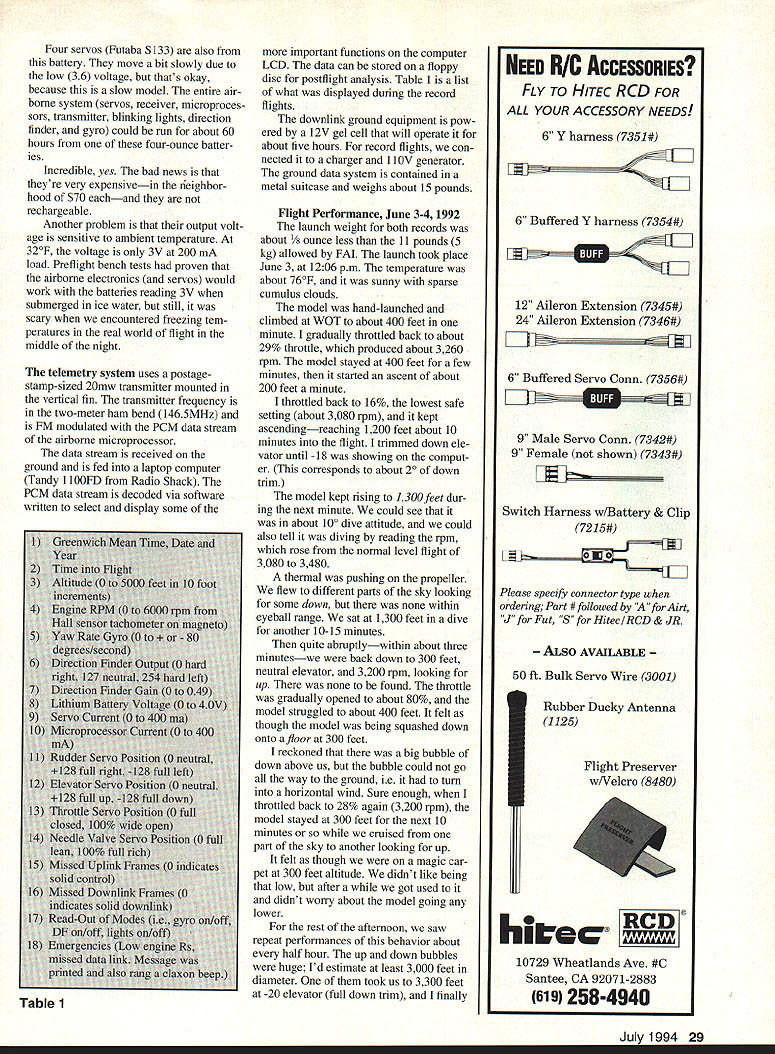
Flight Data Display (Table 1)
The data streamed and displayed during the record flights included:
- Greenwich Mean Time, Date, and Year
- Time into Flight
- Altitude (0 to 5,000 ft in 10 ft increments)
- Engine RPM (0 to 6,000 rpm from Hall sensor tachometer on magneto)
- Yaw Rate Gyro (±80°/s)
- Direction Finder Output (0 hard right, 127 neutral, 254 hard left)
- Direction Finder Gain (0 to 0.49)
- Lithium Battery Voltage (0 to 4.0 V)
- Servo Current (0 to 400 mA)
- Microprocessor Current (0 to 400 mA)
- Rudder Servo Position (0 neutral, +128 full right, −128 full left)
- Elevator Servo Position (0 neutral, +128 full up, −128 full down)
- Throttle Servo Position (0 full closed, 100% wide open)
- Needle Valve Servo Position (0 full lean, 100% full rich)
- Missed Uplink Frames (0 indicates solid control)
- Missed Downlink Frames (0 indicates solid downlink)
- Read-Out of Modes (gyro on/off, DF on/off, lights on/off)
- Emergencies (low engine, R/S missed data link; messages printed and claxon beep)
Flight Performance — June 3–4, 1992
Launch: June 3 at 12:06 p.m. Launch weight was about 1/8 oz less than the 11 lb FAI limit. Temperature ~76°F, sunny with sparse cumulus clouds.
- Hand-launched, climbed at WOT to about 400 ft in one minute. Throttled back to about 29% (≈3,260 rpm). After a few minutes the model began ascending at ~200 ft/min.
- Throttled to 16% (lowest safe setting ≈3,080 rpm). The model continued ascending to ~1,200 ft about 10 minutes into the flight. Elevator was trimmed down until −18 showed on the computer (≈2° of down trim).
- The model climbed to 1,300 ft and appeared to be in a ~10° dive attitude; rpm rose to 3,480—indicating a thermal pushing the propeller. Attempts to find sinking air nearby failed.
- Within a few minutes the model settled back to ~300 ft with neutral elevator and ≈3,200 rpm. The pilot suspected a large down bubble above that turned to horizontal wind at lower levels; throttling back to ~28% allowed the model to stay at 300 ft while searching for lift.
- Throughout the afternoon, large up- and down-bubbles recurred roughly every half hour (estimated bubble diameters ≥3,000 ft). One thermal reached 3,300 ft at −20 elevator (full down trim), at which point the pilot had to dive to regain the desired altitude.
- Night: by about 8 p.m. throttle at 16% and neutral elevator produced ~22 mph airspeed and zero sink in still air. A cold front produced a wind shift and increasing velocity toward dusk.
- From about 9 p.m., the model ceased racetrack loops downwind and instead hovered nearly overhead, tethered by the DF beacon. By about 1 a.m. on June 4 the wind was ~20 mph aloft, and the model hovered about 400 yards downwind of the control station, with the beacon holding it like a kite.
- At 1 a.m. a throttle change to 28% and about 1° down trim increased penetration and the model hovered closer over the control station until ~3 a.m.
- During a long steady-state hover (~6 hours), altitude cycled between ~400 ft and ~1,600 ft about ten times over ten hours—likely standing waves in the nocturnal boundary layer (ground wind ~2 mph, wind aloft ~20 mph).
- Around 3 a.m. the model resumed racetrack loops typical when wind aloft drops below ~15 mph. Sunrise was 5:43 a.m., coffee and Egg McMuffins at ~7 a.m.
- At 10:25 a.m. the team exceeded the old record of 22 hr 19 min held by Gian Aghem Maria of Molino, Italy.
- Goal: "one whole day." At 12:06 p.m., June 4 (24 hours), the pilot descended from 800 ft and at 12:09 shut down the engine and made a dead-stick landing about 8 meters from the launch point. The rain started roughly an hour later.
- The tank was nearly half-full after the 24-hour flight and the engine was in excellent condition.
Flight Performance — October Attempt and Record
Decision: because the engine and tank were in good condition after June, a second test was scheduled for October 1, 1992. Four ounces of battery were added as a precaution against cold; fuel was decreased by a corresponding amount.
Launch: 5:33 p.m., Thursday, October 1. The team expected ~40 hours of flight; some hoped for two days.
- The first night dropped to freezing. There was light wind on the ground but continued light winds and thermal activity aloft. By 2:30 a.m. the model was in a steady hover. Wind and thermal behavior produced long racetrack paths and periodic rise-and-sink cycles (up to ~1,300 ft, down to ~400 ft).
- Smaller thermals had diameters ~300–400 ft, velocities ~200–300 ft/min, and fine-scale turbulence. Down areas were larger and smoother. Horizontal wind stayed below ~15 mph for most of the flight.
- Sunset: 6:59 p.m., Friday. Thermal activity ceased just prior to sunset and the model settled into a long racetrack pattern at night.
- By about 1 a.m. the pilot suspected low fuel: model was light, elevator nearly full down trim at minimum throttle, sitting at ~1,200 ft average but flying faster than normal. A hard rule from past attempts said "don't go below 16% throttle" for fear of engine stoppage.
- The dedicated timers and crew stayed alert through the cold night despite the pilot's warning that a five-minute glide would be available if the engine stopped.
- Engine stopped abruptly at 3:08 a.m. while the aircraft was about half a mile away on a downwind loop. The ground computer sounded an alarm; DF steering and searchlights were used to locate the model. The model was steered upwind and spiraled down to a grass landing about 20 m from the launch point.
- Official time: 33 hours, 39 minutes, 15 seconds—a new record. Initial crew reaction was subdued from fatigue, but after rest and breakfast the team celebrated the accomplishment.
- Postflight inspection: the fuel tank was empty. A blocked carburetor air-bleed during flight had increased average fuel consumption to ~1.7 oz/hr instead of the ~1.3 oz/hr seen during the June flight.
Summary and Prognosis
After over 200 hours of cumulative run time during preparation and record flights, the engine remained clean and showed little wear. The control and telemetry system proved highly reliable and informative. The model's aerodynamic performance indicates it could produce a flight of 50 hours at the FAI 11 lb takeoff weight.
I do not intend to use this exact airframe further. It will be retired until someone surpasses the 33 1/3-hour mark. My next step is to build a similar but slightly larger version to pursue longer goals—possibly even a transatlantic flight.
Two concepts for a transatlantic attempt:
- A high-tech scheme: use a global position system receiver to steer a beeline across the ocean in ~40 hours.
- A low-tech scheme I prefer: launch from the fantail of a large oceangoing yacht out of St. Johns, Newfoundland, set the beacon on the ship, steam at ~22 knots, and land in Cork, Ireland after ~80 hours at sea. It is not New York-to-Paris, but it is across the Atlantic.
Acknowledgements
These records would never have been set without the help of teammates Paul Howey, Tien Seng Chiu, and my son Scott Hill. John Patton served as Contest Director for both flights—a role requiring incredible stamina and patience.
Fellow DCRC and Pegasus RC club members who crewed, officiated, sweated, and froze: Jack Anglin, Charlie Calvert, Don Clark, Harry Gratten, George Massie, John Messano, Bill Savage, Wayne Simpson, and Joe Weaver—my heartfelt thanks.
With great sorrow I express belated thanks to Don Lindley, who died May 26, 1993, in an automobile accident. Don was a man of enormous wit and wisdom and a true friend who gave me invaluable advice about fuels and lubricants.
References
- Hill, M.L., "Beat the Russians or Bust," Model Airplane News, Vol. LXXII, No. 7–8, July–August 1965
- Hill, M.L., "Eleven and a Half Hours of Exciting Boredom," Flying Models, No. 390, September 1969
- Hill, M.L., "Twenty Hours Non-Stop," Model Aviation, Vol. 8, No. 7, July 1982
Transcribed from original scans by AI. Minor OCR errors may remain.

