

RADIO CONTROL ELECTRICS
Bob Kopski, 25 West End Dr., Lansdale PA 19446
Continuing Skyvolt
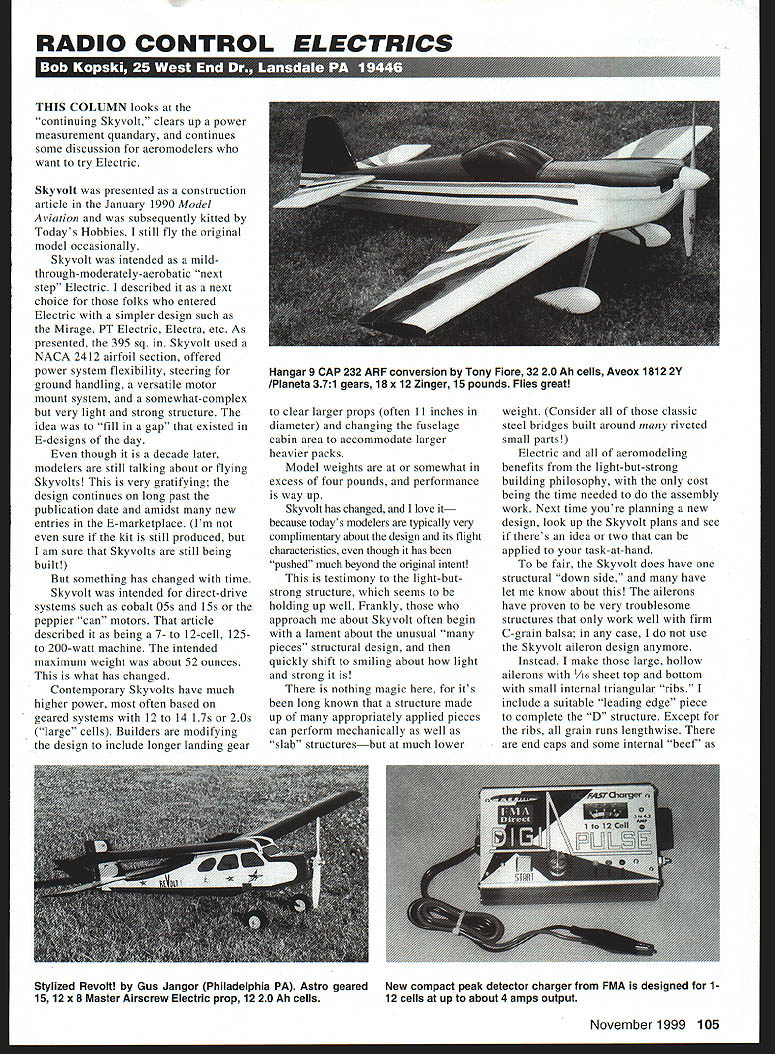
This column looks at the "continuing Skyvolt," clears up a power-measurement quandary, and continues some discussion for aeromodelers who want to try electric.
Skyvolt was presented as a construction article in the January 1990 Model Aviation and was subsequently kitted by Today's Hobbies. I still fly the original model occasionally.
Skyvolt was intended as a mild-through-moderately aerobatic "next step" electric. I described it as a next choice for those folks who entered electric with a simpler design such as the Mirage, PT Electric, Electra, etc. As presented, the 395 sq. in. Skyvolt used a NACA 2412 airfoil section, offered power-system flexibility, steering for ground handling, a versatile motor-mount system, and a somewhat complex but very light and strong structure. The idea was to "fill in a gap" that existed in E-designs of the day.
Even though it is a decade later, modelers are still talking about or flying Skyvolts! This is very gratifying; the design continues on long past the publication date and amidst many new entries in the E-marketplace. (I'm not even sure if the kit is still produced, but I am sure that Skyvolts are still being built!)
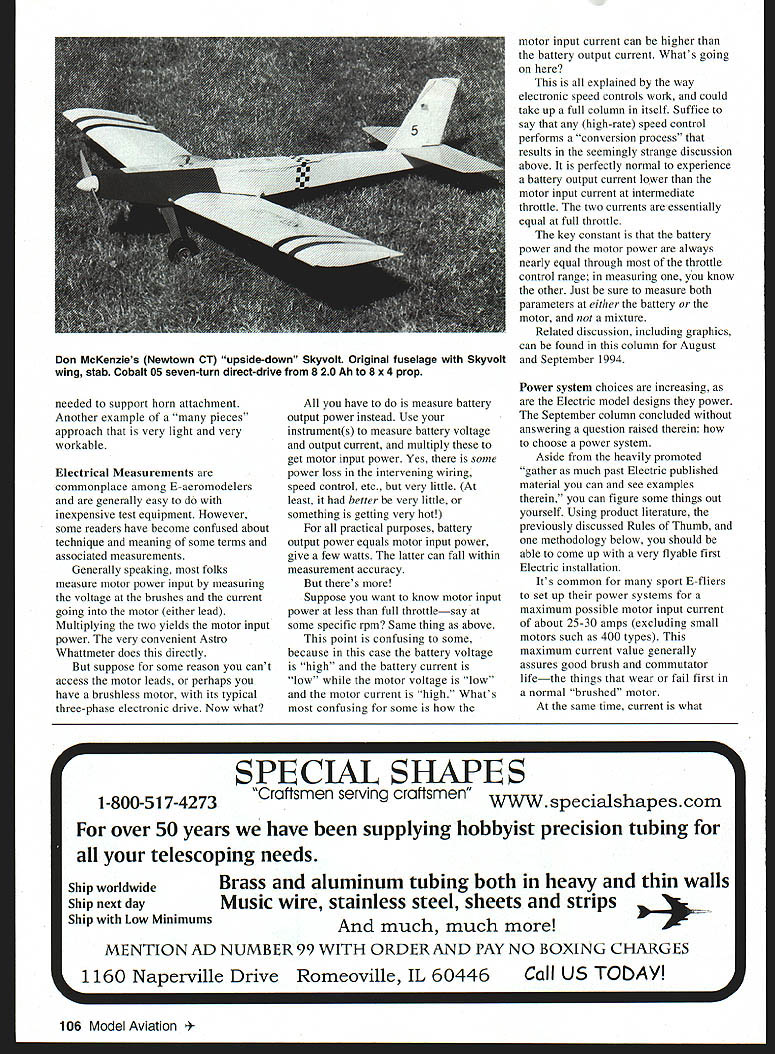
But something has changed with time. Skyvolt was intended for direct-drive systems such as cobalt .05s and .15s or the peppier "can" motors. That article described it as being a 7- to 12-cell, 125- to 200-watt machine. The intended maximum weight was about 52 ounces. This is what has changed.
Contemporary Skyvolts have much higher power, most often based on geared systems with 12 to 14 1.7 Ah or 2.0 Ah ("large" cells). Builders are modifying the design to include longer landing gear to clear larger props (often 11 inches in diameter) and changing the fuselage cabin area to accommodate larger, heavier packs.
Model weights are at or somewhat in excess of four pounds, and performance is way up. Skyvolt has changed, and I love it — because today's modelers are typically very complimentary about the design and its flight characteristics, even though it has been "pushed" much beyond the original intent!
This is testimony to the light-but-strong structure, which seems to be holding up well. Frankly, those who approach me about Skyvolt often begin with a lament about the unusual "many pieces" structural design, and then quickly shift to smiling about how light and strong it is!
There is nothing magic here, for it's been long known that a structure made up of many appropriately applied pieces can perform mechanically as well as "slab" structures — but at much lower weight. (Consider all of those classic steel bridges built around many riveted small parts!)
Electric and all of aeromodeling benefit from the light-but-strong building philosophy, with the only cost being the time needed to do the assembly work. Next time you're planning a new design, look up the Skyvolt plans and see if there's an idea or two that can be applied to your task-at-hand.
Skyvolt ailerons — a structural downside
To be fair, the Skyvolt does have one structural "down side," and many have let me know about this: the ailerons. They have proven to be very troublesome structures that only work well with firm C-grain balsa; in any case, I do not use the Skyvolt aileron design anymore.
Instead, I make those large, hollow ailerons with 1/16" sheet top and bottom with small internal triangular "ribs." I include a suitable leading-edge piece to complete the "D" structure. Except for the ribs, all grain runs lengthwise. There are end caps and some internal "beef" as needed to support horn attachment.
Another example of a "many pieces" approach that is very light and very workable.
Electrical measurements
Electrical measurements are commonplace among E-aeromodelers and are generally easy to do with inexpensive test equipment. However, some readers have become confused about technique and the meaning of some terms and associated measurements.
Generally speaking, most folks measure motor power input by measuring the voltage at the brushes and the current going into the motor (either lead). Multiplying the two yields the motor input power. The very convenient Astro Wattmeter does this directly.
But suppose for some reason you can't access the motor leads, or perhaps you have a brushless motor with its typical three-phase electronic drive. Now what?
All you have to do is measure battery output power instead. Use your instrument(s) to measure battery voltage and output current, and multiply these to get motor input power. Yes, there is some power loss in the intervening wiring, speed control, etc., but very little. (At least, it had better be very little, or something is getting very hot!)
For all practical purposes, battery output power equals motor input power, give or take a few watts. The latter can fall within measurement accuracy.
Measuring at less than full throttle
Suppose you want to know motor input power at less than full throttle—say at some specific rpm? Same thing as above.
This point is confusing to some, because in this case the battery voltage is "high" and the battery current is "low" while the motor voltage is "low" and the motor current is "high." What's most confusing for some is how the motor input current can be higher than the battery output current. What's going on here?
This is all explained by the way electronic speed controls work, and could take up a full column in itself. Suffice to say that any (high-rate) speed control performs a conversion process that results in the seemingly strange discussion above. It is perfectly normal to experience a battery output current lower than the motor input current at intermediate throttle. The two currents are essentially equal at full throttle.
The key constant is that the battery power and the motor power are always nearly equal through most of the throttle control range; in measuring one, you know the other. Just be sure to measure both parameters at either the battery or the motor, and not a mixture.
Related discussion, including graphics, can be found in this column for August and September 1994.
Power system choices and how to choose
Power-system choices are increasing, as are the electric model designs they power. The September column concluded without answering a question raised therein: how to choose a power system.
Aside from the heavily promoted "gather as much past electric-published material you can and see examples therein," you can figure some things out yourself. Using product literature, the previously discussed rules of thumb, and one methodology below, you should be able to come up with a very flyable first electric installation.
It's common for many sport E-fliers to set up their power systems for a maximum possible motor input current of about 25–30 amps (excluding small motors such as 40D types). This maximum current value generally assures good brush and commutator life—the things that wear or fail first in a normal "brushed" motor.
At the same time, current is what "empties the tank," and so the more you use, the faster your motor pack will deplete. Even if you are using a brushless motor, there is still reason for not allowing "too much" current to be possible in your setup.
Choosing a power system can begin with this maximum current guideline.
Referring to the watts-per-pound guideline, the maximum desired motor current actually yields the associated cell count. Assuming that you have a finished model and know the "way it flies" in your mind's eye, the cell count is given by dividing the desired watts by the maximum current value, and dividing that result by cell voltage.
Generally, 1.1 volts per cell is used as a guideline average number throughout flight. Others use 1.0 volts per cell, so you're apt to see differing opinions on this point if you read enough.
I feel that 1.1 volts per cell is a good average number throughout flight (where the throttle is varied), and 1.0 volts per cell is a good number at maximum throttle (also maximum current). In any case, round the arithmetic up to the nearest whole cell.
Steps to choose cells (methodology)
- Decide the desired watts per pound and the model weight to obtain desired total watts.
- Choose a conservative maximum motor current (commonly 25–30 A).
- Compute required voltage: voltage = total watts / maximum current.
- Compute cell count: cell count = voltage / volts-per-cell (use 1.0 or 1.1 as your guideline).
- Round up to the nearest whole cell and check product literature for available motors, packs, and ESCs.
Example: Let's say I want to fly a reasonably peppy model at 100 watts per pound maximum (takeoff or aerobatics) and it's destined to be about a four-pound airplane. This requires 400 watts motor input.
If I conservatively choose not to exceed 25 amps, then the needed maximum voltage is 400 / 25 = about 16 volts. The cell count is 16 / 1.0 = 16 cells, or 16 / 1.1 ≈ 14.5 cells. I could go with 15 or 16 cells.
From reviewing product info in catalogs, there are several product choices, including the venerable Astro 25 and several Aveox products. There are other, less-obvious choices, but these will become more obvious and more numerous as you gain a little experience and the insight that comes with it.
Prop choice and gearing
A major player in the operating power is the prop choice, including gearing and not. I tend to look at "geared props" instead of "geared motors," for what gears really do is change the prop size from one range to another. This is generally done for airplane and flight-performance purposes, although many airplanes do well either way.
The Astro 25 in the example above will perform at the 400-watt level, either direct-drive or geared. As an estimate, the direct-drive prop would be about a 9x5 and for the standard gear set the geared prop would be about an 11x6 or maybe a 10.5x7.
Here is where experience and some motor input voltage and current measurements can come in, and here is where some more difficult judgments may make a difference: Would your airplane fly better with the smaller, faster-turning prop, or with a larger, slower-turning prop? It's sorta like whether you should use a two-stroke or a four-stroke, as some folks view the matter.
It is simply not possible to describe every possible product and product variation, combined with all imaginable aero-applications. Nor is it necessary; surely the watt-power folks always "just know" what to do—right? The very same thing comes about for E-power, with just a little experience.
Upcoming parts of this "miniseries" will get more into this area, since there are often so many choices that can be made for very good E-flight.
Example airplane summary
How did this example airplane turn out? Using the 50% power-system-weight guideline, the motor, battery, ESC, wiring, etc., should come out around 32 ounces. (Everything else in this four-pound airplane is another 32 ounces.) A direct-drive Astro 25, 16 1.0-Ah cells, and ESC, etc., weigh about 33 ounces. Great!
And for any reasonable aircraft design/choice, this thing will fly great! (It's almost like saying "I've got a new .25—now, what do I put it in?) More to come.
Please include a SASE with any correspondence for which you'd like a reply. And don't forget to come up with some E-goodies to include on your Christmas wish list—for a whole lot of electric aeromodel flying fun come next season!
Transcribed from original scans by AI. Minor OCR errors may remain.

