

Radio Control: Electrics
Bob Kopski
Some electric meets for 1987 have been announced.
- The Houston SPARKS (Silent Propelled Aircraft Radio Kontrol Society) will hold their Third Annual Spring Electric Fun-Fly on April 10–11 at Cullen-Barker Park on the Dick Scobee Memorial Flying Field. Several events are planned and will be conducted in accordance with the electric rules proposals published in the February 1987 Model Aviation ("Competition Newsletter" section).
SPARKS President Ken Martin tells me that the new Dick Scobee field "...is most likely the top one in the country..." having a main hard-surfaced runway measuring 80 ft. by 320 ft., with a grass cross-runway measuring 80 ft. by 240 ft. It has many other features including 120-volt outlets, water fountains, rest rooms, paved parking, etc. For more information, please contact Contest Director Eddie Thomas, 1427 Ashwood Drive, Sugar Land, TX 77478. His telephone number is (713) 491-3375. You can also contact Ken Martin at (713) 933-1688.
- Charlie Sylvia tells me that July 19 is the date set for the Third Annual South Shore Electric Fly. Mailers with the details can be had from Charlie at 31 Perry St., Middleboro, MA 02346.
Once again I want to encourage readers with information such as that above to send it to me early. This column is being written the last week of January for the issue dated May and should appear at your door early in April — too close to the SPARKS date for comfort!
Electric safety
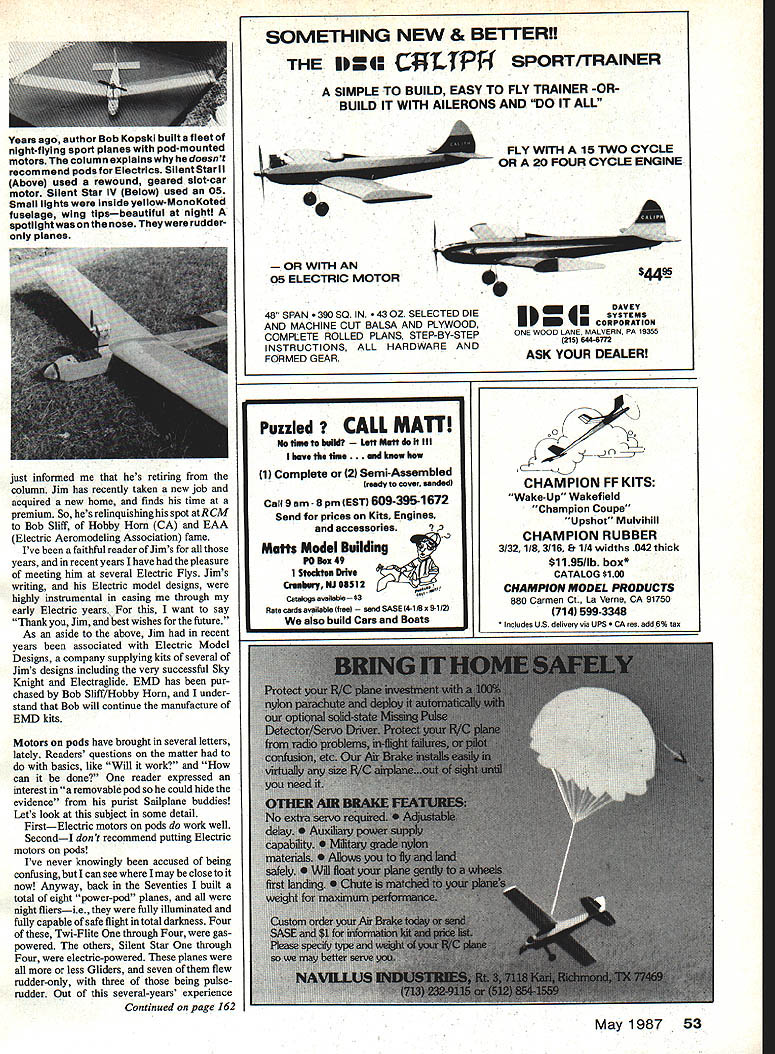
Electric safety is just as important as any other kind of safety, and in that light I want to direct your attention to Mitch Poling's "Silent Power" column in the February 1987 issue of Model Builder. This reference is useful not only to electric modelers but to anyone using lead/acid batteries such as those used to power the starters for gas engines.
Lead/acid batteries have the characteristic of liberating hydrogen gas during charging, and hydrogen in the presence of oxygen (in the air we breathe) and a spark (such as from a loose terminal connection) can produce a powerful explosion. This is nothing new; in fact all new-car owners' manuals I've seen go to great lengths describing safe charging and "jump-starting" procedures for the same reason.
Please — read Mitch's referenced column, and be careful! Mitch's column was also reprinted, in part, in John Preston's "Safety Comes First" column in the April issue of this magazine.
Incidentally, that same issue of Model Builder has a story on the history and current capability of America's oldest electric model motor manufacturer, Astro Flight. If you've ever wondered how it's done, read that article after you read Mitch's column!
Personnel and industry notes
Electric columnist Jim Zarembski, RCM's "Silent Power" writer for the past 11 years, has just informed me he's retiring. Jim has recently taken a new job and acquired a new home, and finds time at a premium. So he's relinquishing the spot at RCM. I've been a faithful reader of Jim's for all those years, and in recent years I have had the pleasure of meeting him at several electric flys. Jim's writing, and his electric model designs, were highly instrumental in easing me into the world of electrics. For this, I want to say, "Thank you, Jim," and best wishes for the future.
As an aside, Jim had in recent years been associated with Electric Model Designs (EMD), a company supplying kits of several of Jim's designs including the very successful Sky Knight and Electraglide. EMD has been purchased by Bob Sliff / Hobby Horn, and I understand that Bob will continue the manufacture of EMD kits.
Motors on pods — experience and recommendations
Motors on pods have brought in several letters lately. Readers' questions on the matter had to do with basics, like "Will it work?" and "How can it be done?" One reader even expressed an interest in "a removable pod so he could hide the evidence" from his purist sailplane buddies! Let's look at this subject in some detail.
First — electric motors on pods do work well. Second — I don't recommend putting electric motors on pods!
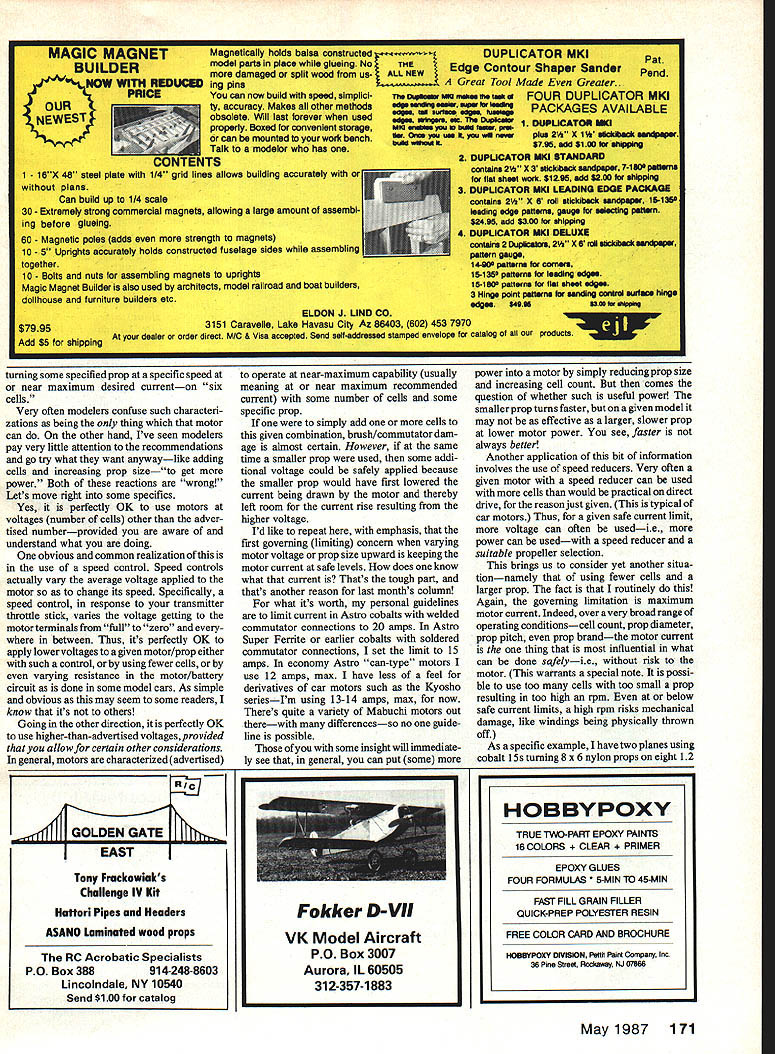
I've never knowingly been accused of being confusing, but I can see where I may be close to it now! Anyway, back in the Seventies I built a total of eight "power-poor" planes, and all were night-fliers — i.e., they were fully illuminated and fully capable night fliers in total darkness. Four of these, Twin-Flite One through Four, were gas-powered. The others, Silent Star I through III, were electric-powered. These planes were all more or less gliders, and seven of them were rudder-only, with three of these being pulse-rudder. Out of this several-years' experience came some quite firm lessons:
- Flying in total darkness is perfectly doable, downright fun, but too hard for most modelers to believe without being there!
- Gas flying in total darkness is even more of a mess than it is in full daylight!
- Electric motors on pods can fly very well — but can also be a genuine pain!
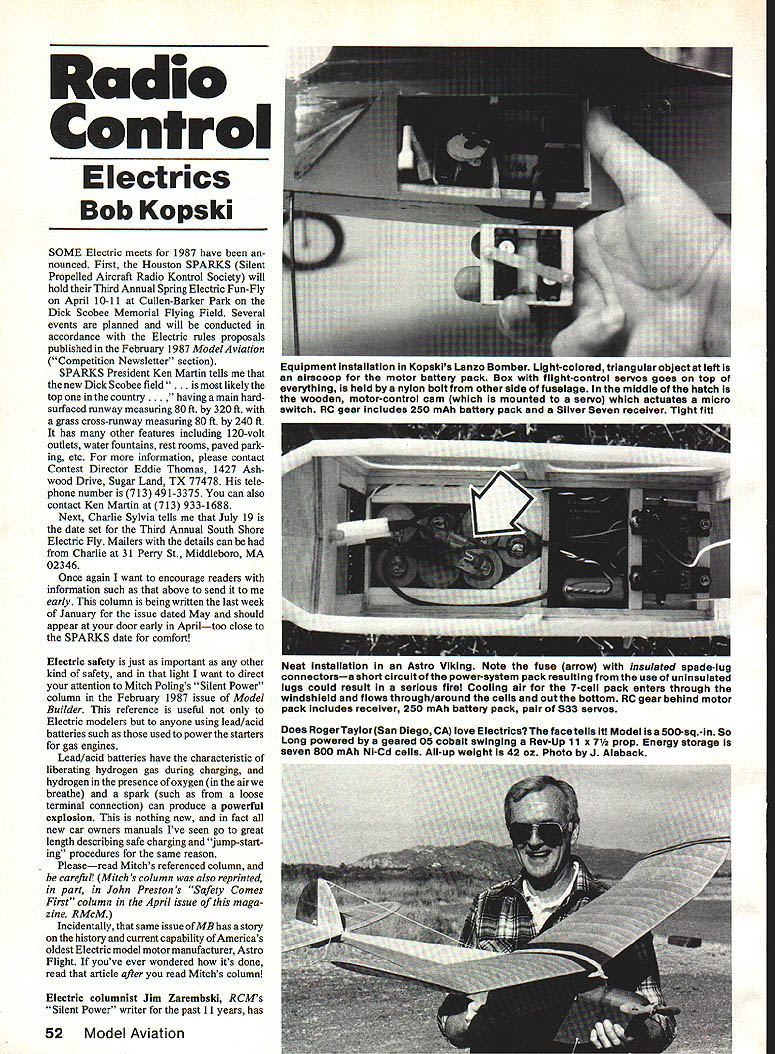
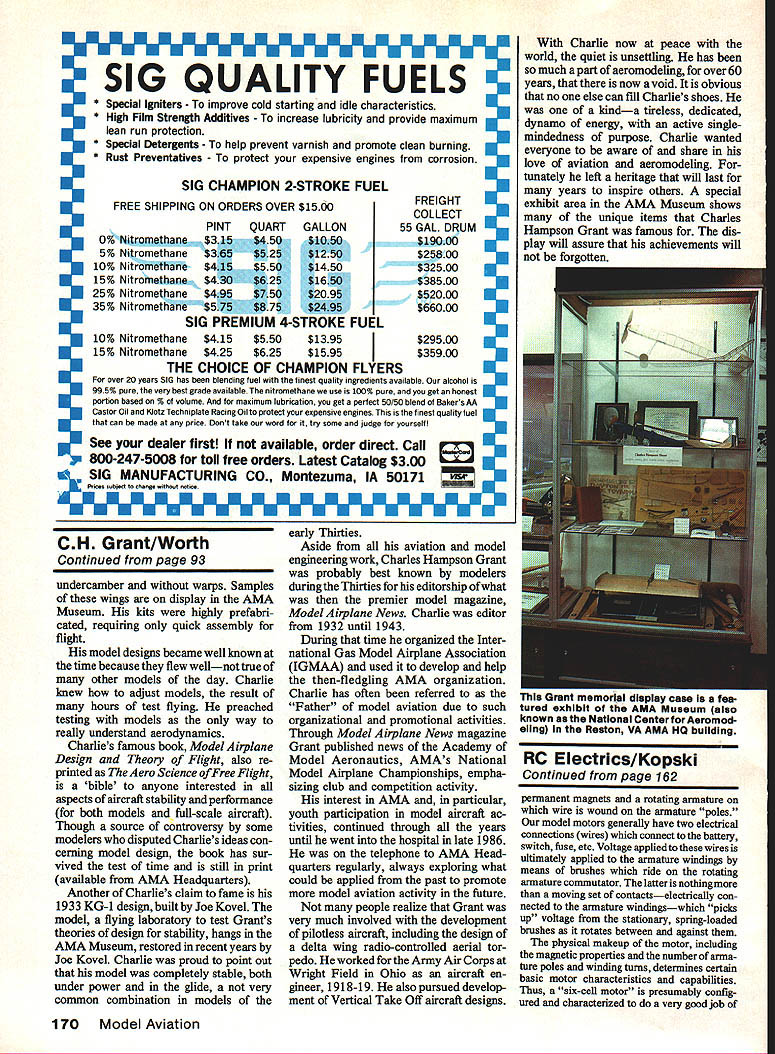
The photos show two highly successful electric night fliers. The fact that the planes flew very well is sort of self-evident in that they were rudder-only — they had to be well-behaved! Anyway, the motor/pods were installed just in front of the leading edge of the wing and at a height just sufficient for prop clearance. All my installations were tractor except for one gas pusher. The thrust lines were set at zero down, zero side. The motors and props were otherwise "normal," with flat-bottomed airfoil sections ranging in thickness from 10% to 12½%.
Wings were typically set at an angle of incidence of positive two to three degrees and to give a stable power-off glide. Balance points were typically at 30–33% MAC. Wing loadings were typically eight ounces per square foot for gas and 10–11 oz. for electric. Flight speed was relatively slow, and rudder surfaces/throws were relatively large.
And — except for a couple of radio-battery rundowns — there hadn't been any nighttime flight difficulty or need to "go find the plane" over an active period of several years! So why don't I recommend motors on pods? Strictly mechanical/structural reasons — the "pain" part of the story.
Electric motors are comparatively heavy, and it turns out, in my experience, that one cannot make a pod strong enough to hold up under normal flight usage. Even a relatively minor landing bump causes a severe load on the pod/pylon structure, and damage to same is all but guaranteed. In fact, in the beginning I spent more time repairing pods than doing anything else!
I finally reached the point where I attached the motor to the fuselage via a tongue-and-groove arrangement as a friction slip-joint with screw-adjusted tightness. This allowed me to change assembly to pull free from the fuselage if overloaded. While this put the motor/pod in a "failing" mode constrained only by the motor wires, it did put a stop to continuing structural destruction!
The only reasons the motors were on the pod in the first place were so that I could install a pylon in the nose where the motor would normally be and to minimize motor intrusion with the ground because landing attitude is all but impossible to judge in total darkness. So, unless you have no choice (i.e., some extreme reason) for not installing a motor conventionally, I suggest not using electric motors on pods. Structurally, they're a pain!
Electric motor fundamentals and practical guidance
The mysteries of motors continue to bewilder many readers, especially newer electric modelers. Last month this column offered some thoughts about updating the way model motors are characterized and described so that modelers could (eventually) more easily (and with insight and understanding) relate motor "size" to plane "size."
Now I'd like to offer some thoughts and information about electric motors in general. The idea here is to illustrate that there is more to electric life than you might have gathered from your motor's instruction manual!
By now, most readers know that a typical model motor has an iron housing containing permanent magnets and a rotating armature on which wire is wound on the armature "poles." Our motors normally have two electrical connections (wires) which connect to the battery, switch, fuse, etc. Voltage applied to these wires is ultimately applied to the armature windings by means of brushes which ride on the rotating commutator. The commutator is a rotating set of contacts — electrically connected to the armature windings — which "picks up" voltage from the stationary, spring-loaded brushes as it rotates between and against them. The brushes and commutator design determine current/voltage characteristics by virtue of material, geometry, and contact design.
It is the basic motor characteristics of commutator/brush design, number of turns, type of wire, and pole‑shoe/field magnet separation that primarily determine a motor's speed, torque capability, and efficiency.
Thus, a "six-cell motor" is probably configured and characterized to do a very good job on six Ni‑Cd cells; a "four-cell motor" is set up for about four cells, and so on. When a motor is used at voltages or loads far from its design point, performance and life will suffer. Gearboxes allow a motor to run at higher, more efficient rpm while delivering propeller torque at a lower speed; direct drive requires the motor itself to provide the torque at propeller speed. Look to published recommendations for cell counts, prop sizes, gear ratios, and expected current draw — these come from bench testing and flight experience and will save you time and equipment. Typically a motor rating refers to turning some specified prop at a specific speed at or near maximum desired current on the advertised cell count (for example, "six cells").
Very often modelers confuse such characterizations as being the only thing which that motor can do. On the other hand, I've seen modelers pay very little attention to the recommendations and go try what they want anyway — like adding cells and increasing prop size — to get more power. Both reactions are misguided. Let's move into some specifics.
Yes, it is perfectly OK to use motors at voltages (number of cells) other than the advertised number — provided you are aware of and understand what you are doing.
One obvious and common realization of this is in the use of a speed control. Speed controls actually vary the average voltage applied to the motor so as to change its speed. Specifically, the speed control, in response to your transmitter throttle stick, varies the voltage getting to the motor terminals from "full" to "zero" and everywhere in between. Thus, it's perfectly OK — and, I might add, very desirable — to operate a motor across a wide range of cell counts by using such a control, or by using fewer cells, or by using ever-varying resistance in the motor/battery circuit as is done in some model cars.
Going in the other direction, it is perfectly OK to use higher-than-advertised voltages, provided that you allow for certain other considerations. In general, motors are characterized (advertised) to operate at near-maximum capability (usually meaning at or near maximum recommended current) with some number of cells and some specific prop.
If one were to simply add one or more cells to this given combination, brush/commutator damage is almost certain. However, if at the same time a smaller prop were used, then some additional voltage could be safely applied because the smaller prop would have less load and the current being drawn by the motor would be lower than the current rise resulting from the higher voltage.
I want to repeat, with emphasis, that the first governing (limiting) concern when varying motor voltage or prop size upward is keeping the motor current at safe levels. How does one know what that current is? That's the tough part, and that's another reason for last month's column. For what it's worth, my personal guidelines are:
- Astro Cobalts with welded commutator connections: limit to 20 amps.
- Astro Super Ferrite or earlier Cobalts with soldered commutator connections: limit to 15 amps.
- Economy Astro "can-type" motors: 12 amps max.
- Car-motor derivatives (e.g., Kyosho series): I use 13–14 amps max for now.
There's quite a variety of Mabuchi motors out there — with many differences — so no single guideline is possible.
Those of you with some insight will immediately see that, in general, you can put (some) more power into a motor by simply reducing prop size and increasing cell count. But then comes the question of whether such is useful power! The smaller prop turns faster, but on a given model it may not be as effective as a larger, slower prop at lower motor power. Faster is not always better.
Another application of this is the use of speed reducers. Very often a given motor with a speed reducer can be used with more cells than would be practical on direct drive, for the reason just given. Thus, for a given safe current limit, more voltage can often be used — i.e., more power — with a speed reducer and a suitable propeller selection.
This brings us to using fewer cells and a larger prop. The fact is that I routinely do this! Again, the governing limitation is maximum motor current. Indeed, over a very broad range of operating conditions — cell count, prop diameter, motor rpm, etc. — I carry one broad-range rule: motor current is the single thing most influential in what can be done safely — i.e., without risk to the motor.
Note: It is possible to use too many cells with too small a prop resulting in too high an rpm. Even at or below safe current limits, a high rpm risks mechanical damage, like windings being physically thrown off.
As a specific example, I have two planes using Cobalt 15s turning 8 x 6 nylon props on eight 1.2-volt cells — this motor is normally thought of as a 12-cell motor! Why am I doing this? Because I want that kind of prop speed (about 9,400 rpm) at that current (about 17 amps) at that power (about 140 watts) for that plane (Spectra Stunt) at that weight (42 oz.), and that's that!
I realize the above hardly covers the topic in full and probably raises more questions than it answers. Good. That's in part why I did it! And that's indicative of why I used last month's column to encourage better, more meaningful motor descriptions. You can do a great deal other than what is advertised with just a little insight and understanding — and a current meter and a tach! Additional reading on this subject may also be found in the "All About Electric" articles in the October and November 1983 issues of this magazine. (See this column, April 1986 and also February 1987, for more info on current meters.)
Contact
Please forward any comment or question (with SASE, please) to the author: Bob Kopski, 25 West End Dr., Lansdale, PA 19446.
P.S. I respond to all letters requesting info and help (and even to some requesting nothing). Normally I write and mail responses within a week. Frequently I get involved with overtime, business travel, etc., or with getting information with which to respond, and the response time is longer. Whatever, I respond to everyone where appropriate. If you've written and didn't get my reply within a few weeks, then I did not get your letter — or you did not get mine. Don't get angry — get another piece of paper and try again!
Transcribed from original scans by AI. Minor OCR errors may remain.

