

Radio Control: Electrics
Bob Kopski 25 West End Dr. Lansdale, PA 19446
Meet announcements
- Fifteenth Annual Astro Flight Electric Champs
- Date: June 17–18, 1989
- Location: Fairview Regional Park, Costa Mesa, CA
- Events: seven-cell Sailplane and Old-Timer, Unlimited Sailplane and Old-Timer (man-on-man format; limited motor runs, thermal duration, and landing scoring)
- Info: Harbor Soaring Society, 1204 Palm Ave., Huntington Beach, CA 92648
- Second Annual Lehigh Valley Electric Fun-Fly
- Date: June 17–18, 1989 (same dates as Astro Flight Champs)
- Location: Easton, PA (near Allentown)
- Notes: Welcomes all electrics and skill levels; simple fun events and lots of prizes for skill and luck
- Info: Ellis Grumer, 321 Aurora St., Phillipsburg, NJ 08865; tel. (201) 859-0969 or Stan Raukaitis, tel. (215) 252-2024
- First Annual BCR/CC Electric Fly
- Date: July 8, 1989
- Location: Northern Burlington County Regional High School (sponsored by the Burlington County Radio Control Club), New Jersey
- Notes: Fun-fly, low-pressure events
- Info: Robert Afflerback, 123 Harrington Circle, Willingboro, NJ 08046; tel. (609) 871-8777
- Midwest Electric Fly (two-day dual meet)
- Dates: July 8–9, 1989
- Location: Ann Arbor area
- Saturday (July 8) — sponsored by Electric Fliers Only club
- Contest Director: Ken Myers, tel. (313) 698-4668
- Events: Triple Duration Sailplane, Most Beautiful, Triple Duration Other, Best Non-kit Airplane, Best Scale, Dual Duration
- Sunday (July 9) — hosted by Ann Arbor RC Falcons
- Contest Director: Dr. Keith Shaw, tel. (313) 973-6309
- Events: All-Up/Last-Down, Best Scale, Most Impressive, Best Aerobatic
- Notes: $3 entry per day
Motor characteristics — basic theory
Begin with a permanent-magnet electric motor like those used in R/C electrics. Such motors display predictable operational characteristics that can be approximated by a simple mathematical relationship:
V = (k × RPM) + (I × R) (1)
Where:
- V = voltage applied to motor terminals
- RPM = motor speed (revolutions per minute)
- I = motor current
- R = motor resistance (equivalent total motor resistance — armature winding plus brush resistance)
- k = a constant dependent on motor construction (number of poles, turns, armature and magnetic makeup)
k is a design choice; it determines the RPM the motor will turn at a given applied voltage. In the idealized case (no internal resistance or load), the motor would obey:
V = k × RPM, or RPM = V / k (2)
Equation (2) describes an ideal motor whose RPM depends only on applied voltage and k. Real motors are not ideal, so R enters the picture. Rearranging (1):
RPM = (V − (I × R)) / k (3)
Equation (3) shows that the ideal RPM given by V and k is reduced by the term I × R. A larger prop draws more current, so the motor slows down simply because it draws more current.
R also causes heating: power lost as heat is I^2 × R. Because I^2R losses can be large, it is important that R be small. Heavy armature windings and high-quality brushes in good, tight contact with the commutator reduce R. Tight brush contact produces some frictional loss, but that is generally much less than the loss caused by poor resistive brush contact.
I’ll expand on practical use of these relationships in future columns; combined with upcoming prop data you’ll be able to make better choices for Electrics.
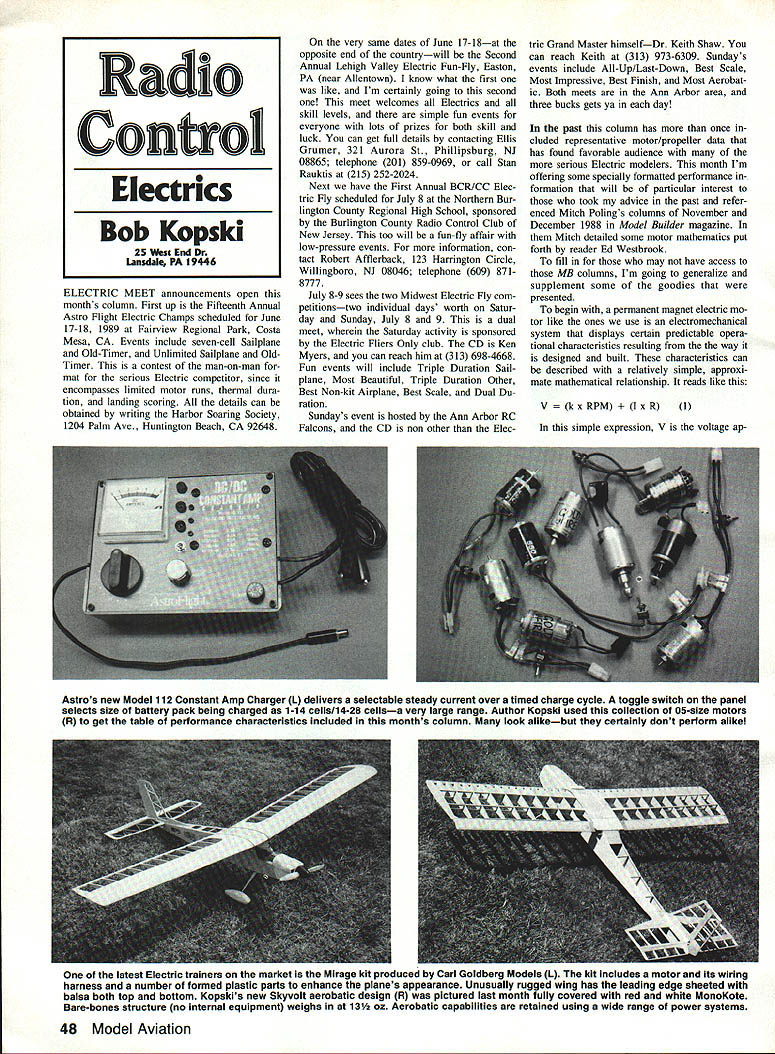
Motor testing — methods used
The following data summarize testing performed on a sample of .05-size motors (that's 1/2 in., notorious, meaningless nomenclature again). Tests were designed to determine motor constants (k and R) and to compare motor behavior under load.
Test procedure highlights:
- Each motor was first run at two low voltages without a prop, using a thin, flat two-bladed "stick" to provide a negligible load but give a tachometer reading. The two RPM values and applied voltages were averaged to calculate the motor k (volts per rpm).
- Each motor was then run with the same prop (Top Flite X-4 wood) with exactly 6.0 volts applied at the brushes. Motor current and RPM were recorded; input power = 6.0 V × current.
- For the Top Flite X-4 prop, the applied voltage was adjusted so each motor turned 9,000 rpm. The voltage required to reach 9,000 rpm varied because of differences in R and internal friction. High and low voltage readings were discarded and remaining readings averaged; this average voltage divided by the current gave R as listed.
- Motor R was also measured by applying an electronically regulated 10.0 A supply with the armature stalled; terminal voltage was recorded 10 times at different commutator positions, extremes discarded, remaining readings averaged, and dividing that average voltage by 10 A yielded R.
- Digital instrumentation was used throughout. Comparative data are believed to be reliable; absolute sample sizes for each motor model were limited and motors were run for only a minute or two, so no claim is made that any single motor will sustain all indicated test values.
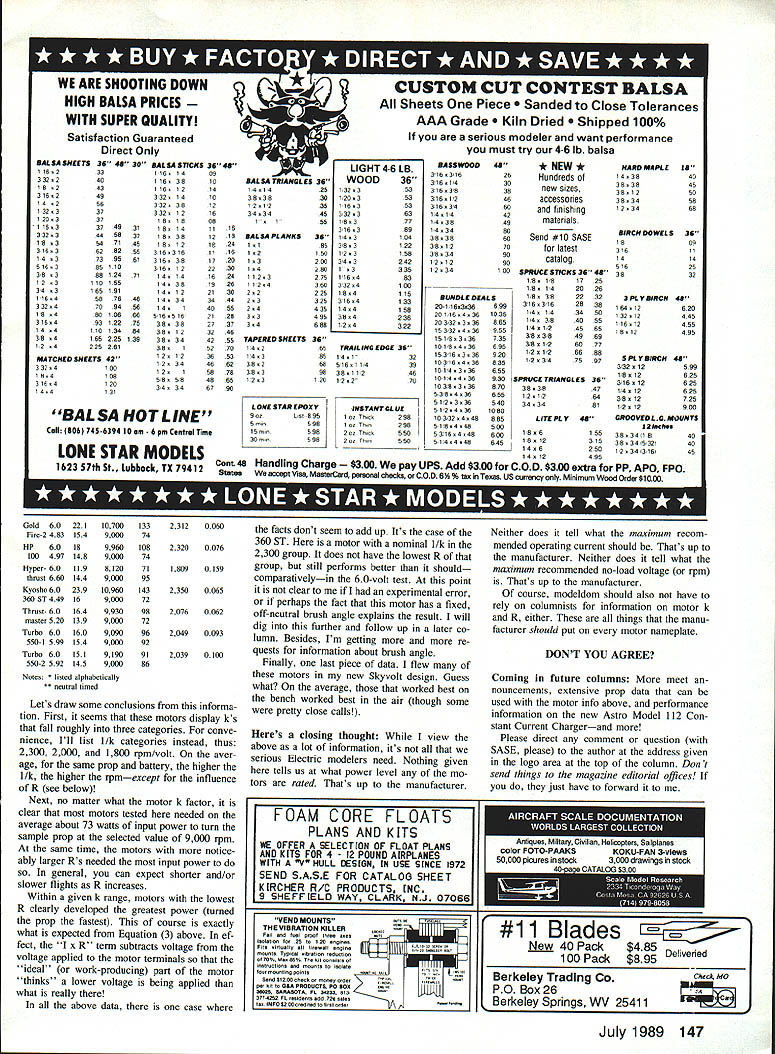
Measured and calculated motor performance
Conclusions drawn from the data:
- Motors grouped by k (expressed here as 1/k) fell roughly into three categories: about 2,300, 2,000, and 1,800 rpm/volt. All else equal, a higher 1/k yields higher RPM for the same prop and battery, though R can alter this.
- Most motors needed about 73 watts of input power on average to turn the sample prop at 9,000 rpm. Motors with larger R required more input power to reach that speed. In general, expect shorter and/or slower flights as R increases.
- Within a given k range, motors with the lowest R developed the greatest effective power (turning the prop fastest). This matches Equation (3): the I × R term subtracts from the effective voltage available to produce work.
- One anomalous case was the 360 ST: although its nominal 1/k placed it in the 2,300 group and it did not have the lowest R in that group, it still performed comparatively better in the 6.0 V test. Possible explanations include experimental error or the motor having a fixed off-neutral brush angle. I will investigate brush angle effects in a later column.
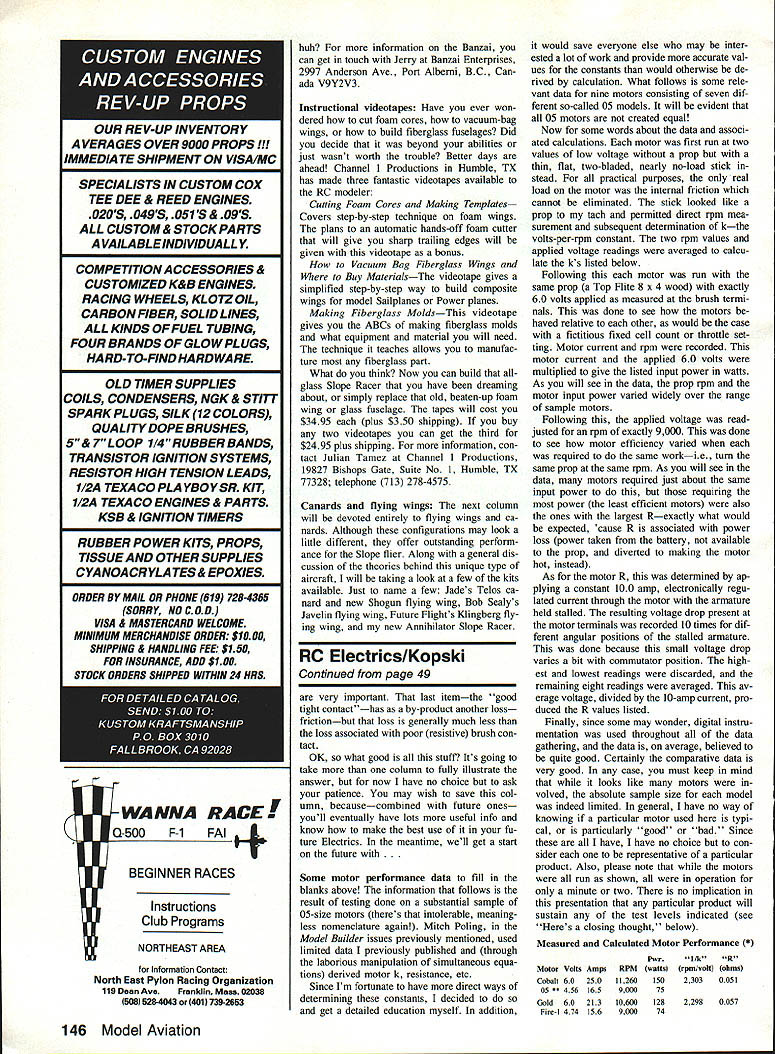
- Flight experience with these motors in my Skyvolt design showed that, on average, motors that performed best on the bench also performed best in the air (though differences were sometimes close).
A final practical note: the data shown here do not state manufacturers' power ratings, maximum recommended operating current, or maximum recommended no-load voltage (rpm). Those are manufacturers' responsibilities and should be on every motor nameplate. Modelers should not have to rely solely on columnists for motor k and R values.
DON'T YOU AGREE?
Coming in future columns: more meet announcements, extensive prop data that can be used with the motor information above, performance information on the new Astro Model 112 Constant Current Charger, and more.
Please direct any comment or question (with SASE, please) to the author at the address above. Do not send items to the magazine editorial offices — they will simply forward them to me.
Radio Control — Electrics Bob Kopski 25 West End Dr., Lansdale, PA 19446
Transcribed from original scans by AI. Minor OCR errors may remain.

