


Radio Control: Electrics
Bob Kopski 25 West End Dr. Lansdale, PA 19446
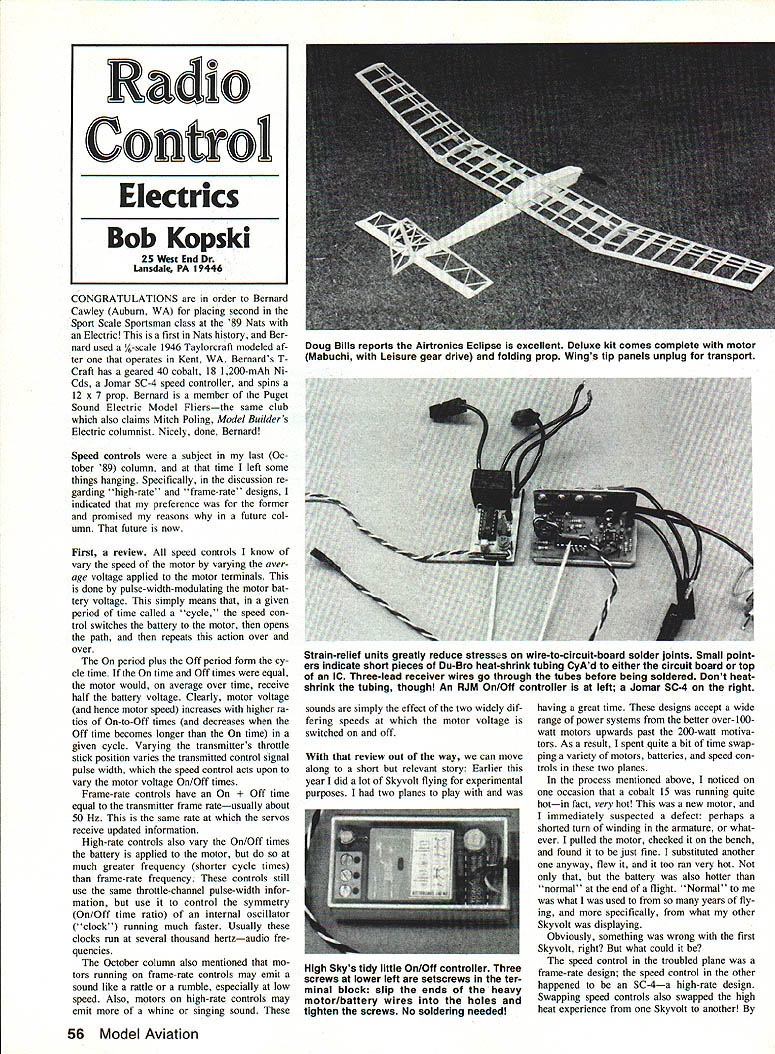
CONGRATULATIONS are in order to Bernard Cawley (Auburn, WA) for placing second in the Sport Scale Sportsman class at the '89 Nats with an electric! This is a first in Nats history, and Bernard used a 1/6-scale 1946 Taylorcraft modeled after one that operates in Kent, WA. Bernard's T‑Craft has a geared .40 Cobalt, 1,200‑mAh NiCd cells, a Jomar SC‑4 speed controller, and spins a 12 x 7 prop. Bernard is a member of the Puget Sound Electric Model Fliers — the same club which also claims Mitch Poling, Model Builder's electric columnist. Nicely done, Bernard!
Review: how speed controls work
All speed controls I know of vary the speed of the motor by varying the average voltage applied to the motor terminals. This is done by pulse‑width modulating the motor battery voltage. In a given period of time called a "cycle," the speed control switches the battery to the motor, then opens the path, and repeats this action. The On period plus the Off period form the cycle time. If the On and Off times were equal, the motor would, on average, receive half the battery voltage. Motor voltage (and hence motor speed) increases as the On-to-Off time ratio increases, and decreases when the Off time becomes longer. Varying the transmitter's throttle stick position varies the transmitted control signal pulse width, which the speed control acts upon to vary the motor voltage (On/Off times).
Frame‑rate controls have an On + Off time equal to the transmitter frame rate — usually about 50 Hz. This is the same rate at which servos receive updated information.
High‑rate controls also vary On/Off times but do so at a much greater frequency (shorter cycle times) than the frame rate. These controls still use the same throttle channel pulse‑width information, but use it to control the symmetry (On/Off time ratio) of an internal oscillator running much faster — usually at several thousand hertz (audio frequencies).
Motors running with frame‑rate controls may emit a rattle or rumble, especially at low speed. Motors on high‑rate controls may emit more of a whine or singing sound. These sounds are simply the effect of the differing switching frequencies.
Why I prefer high‑rate designs (experiments and observations)
Earlier I left some things hanging in the discussion of "high‑rate" vs. "frame‑rate" designs and promised reasons. Here they are.
I did a lot of Skyvolt flying earlier this year for experimental purposes. I had two planes to play with; these designs accept a wide range of power systems — from over 100 watts up past 200 watts. I spent quite a bit of time swapping motors, batteries, and speed controls between the two planes. On occasion I noticed a Cobalt 15 running very hot in one plane while the same motor ran normally in the other. I checked the motor on the bench and found it fine; substituting another motor gave the same result. The one variable that correlated with the high heat was the type of speed control: the troubled plane had a frame‑rate design speed control; the other plane had a Jomar SC‑4 high‑rate design. Swapping speed controls swapped the high‑heat experience between the planes.
Naturally, I set up a bench experiment. I used a Cobalt 15 with an 8 x 4 prop and an adjustable lab supply to establish reference conditions. I wanted to measure armature shaft temperature at the rear bearing after a specified motor run time. Ten thousand rpm — especially important in this case — represents about 110 watts, or about one‑half the power the motor will deliver at full tilt.
Test 1 — reference run:
- Motor run: 3 minutes at the reference condition.
- Rear bearing temperature after 3 minutes: 54.8°C.
- Ambient temperature: 24.9°C.
Test 2 — frame‑rate control:
- I cooled the motor to ambient, set the supply to represent an average 12‑cell pack under load (about 13.5 volts), installed a frame‑rate speed control, throttled to full, and ran for one minute.
- Rear bearing temperature after 1 minute: 84.2°C.
Test 3 — high‑rate (Jomar SC‑4):
- After cooling again to ambient and repeating the same conditions with an SC‑4, the rear bearing temperature after 1 minute was 62.0°C.
The conclusion is obvious: under these conditions the motor runs much hotter with a frame‑rate control than with a high‑rate control. The higher motor and battery temperatures with the frame‑rate control correspond to significantly shorter flight times.
Flight event note: Maxi‑Flight
This year's KRC Electric Fly (about three weeks from this writing, Sept 16–17) will introduce a new event: the Maxi‑Flight. This event was designed for the technologist and the strategist pilot, as it requires one continuous flight task on one charge. The pilot is required to land and relaunch after every fourth minute of predicted time.
With more limited data and short charges, the Nyquist cruised for 2.4 minutes and 3.9 minutes, respectively. Predicted time: 4.9 minutes.
Flight results and rule of thumb
It is clear that model power systems are more efficient when high‑rate controls are used. Actually, it is the motor that gains efficiency when used with high‑rate controls. The high motor and battery temperature and the much shorter flight times with frame‑rate controls show this dramatically.
Speed controls are often advertised or evaluated only with regard to "on‑resistance" or "voltage loss in the full‑on" condition. Most designs use several MOSFETs in parallel, and full‑on voltage drop tends to be small and similar across many designs. But "full‑on" loss does not tell the whole story for varied throttle use. If full‑on were the only operating condition, a simple switch would be a better choice. Because we often cruise at moderate throttle for extended periods, the switching frequency behavior matters.
Rule of thumb derived from these experiments:
- If you're operating with long cruise times at moderate throttle and you want maximum efficiency and minimum motor heating, high‑rate speed controls are preferable.
- Frame‑rate controls are still useful where simplicity, lower cost, and lighter weight are priorities, or where the motor is not being pushed into high average power for extended periods.
- Cruise times and temperatures can vary dramatically depending on the speed control type — cruise times are much shorter and temperatures much higher with frame‑rate controls under continuous moderate loads.
After amassing a respectable data array, the following conclusions stood out:
- Efficiency predictions were roughly accurate for high‑rate controls.
- Actual flight times varied dramatically with the type of speed control used; cruise times were much shorter with frame‑rate controls and motors/batteries ended up much hotter.
- The excess heat associated with frame‑rate controls represents power wasted — power not available to turn the prop.
Some specific flight comparisons:
- The Challenger had a predicted cruise time of about 25 minutes. Average cruise time with a frame‑rate control was 18.5 minutes; with a high‑rate control it was 30.4 minutes.
- The Eureka cruised for an average of 6.6 minutes with one control type and 9.5 minutes with the other. The Rule of Thumb prediction for that case was 9.8 minutes.
Glitching and non‑optically coupled controls
One more important matter is non‑optically coupled speed controls and glitching. I flew many electrics and saw a wide variety of flight performance. Every so often I experienced motor‑induced glitching; in one case the plane was essentially unflyable, with ground range in tens of feet. Substituting a different radio significantly improved the situation, suggesting a radio problem.
I advised the pilot to send the radio for warranty repair, but I also tried a simple fix on the plane: since the speed control was not optically coupled, I installed three small chokes in the three speed‑control‑to‑receiver leads. This effectively broke the radio/speed‑control connection at radio frequency (but not at DC or servo‑pulse‑signal frequencies), and it worked well — the plane became perfectly flyable. Two other systems that were somewhat glitchy were similarly modified with good results. The 10‑microhenry chokes are available from Ace R/C, Inc. as part #LL106 (about 50¢ each). I cannot guarantee the same success with every combination, but it is inexpensive to try.
New hardware and battery sources
One more speed control item: Jomar will soon announce a new big‑motor unit intended for use with 24 to 32 cells. I don't have release date or price as of this writing; contact Jomar (see their ad) for details and service.
Electric supplies are available from SR Batteries. SR can supply a wide range of electric goodies including Astro, Jomar, Robbe, KSC, and other name brands (often at discount prices), in addition to the popular SR batteries. Many readers have written in about the high‑capacity Magnums, especially the L2500s — a cell specified at 1,250 mAh capacity but with the physical size and nominal weight of the familiar 800 ARCs. Larry Sribnick at SR tells me he won't divulge proprietary supplier or process information — it's his recipe — but he will make custom battery packs to your requirements. Check the SR ad in this issue and request their catalog.
Closing
Remember that electrics work great in the winter, and it's easy to keep them clean at low temperatures since there's no black, sticky goo to wipe off the plane.
Happy, quiet, electric landings, everyone.
Transcribed from original scans by AI. Minor OCR errors may remain.

