
RADIO CONTROL HELICOPTERS
Paul Tradelius
4620 Barracuda Dr., Bradenton, FL 34208
The address at the top of this column means that I have finally moved in. Living in a two-bedroom apartment for the past eight months, while my house was under construction, was nicer than I thought it would be; life was simple, with only the barest necessities. Now that we have all of our household goods from storage, it will still be several weeks until I have the garage and my workshop set up the way I want them.
However, I admit that I am having fun in the process, getting rid of small and outdated parts that I haven't used in years. I saved all of them, thinking that they would come in handy someday; that someday is here, and out they go. I wonder how many of the discarded pieces I'll need on my next project.
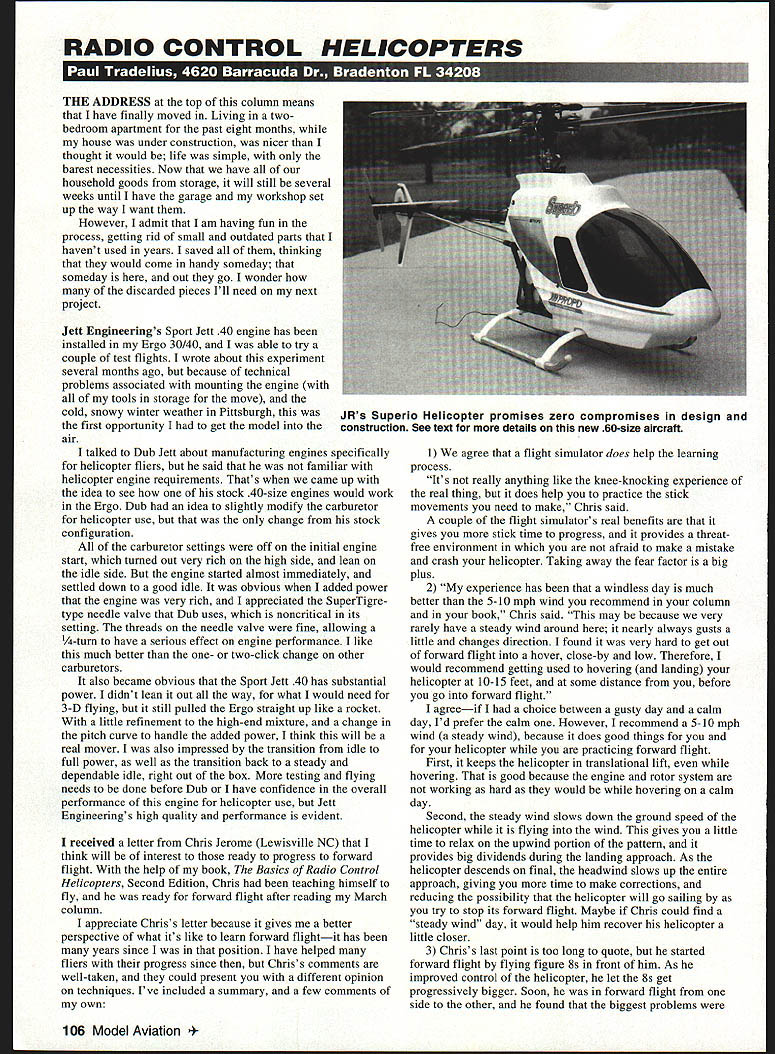
Jett Engineering's Sport Jett .40 engine has been installed in my Ergo 30/40, and I was able to try a couple of test flights. I wrote about this experiment several months ago, but because of technical problems associated with mounting the engine (with all of my tools in storage for the move), and the cold, snowy winter weather in Pittsburgh, this was the first opportunity I had to get the model into the air.
I talked to Dub Jett about manufacturing engines specifically for helicopter fliers, but he said that he was not familiar with helicopter engine requirements. That's when we came up with the idea to see how one of his stock .40-size engines would work in the Ergo. Dub had an idea to slightly modify the carburetor for helicopter use, but that was the only change from his stock configuration.
All of the carburetor settings were off on the initial engine start, which turned out very rich on the high side, and lean on the idle side. But the engine started almost immediately, and settled down to a good idle. It was obvious when I added power that the engine was very rich, and I appreciated the SuperTigre-type needle valve that Dub uses, which is noncritical in its setting. The threads on the needle valve were fine, allowing a 1/4-turn to have a serious effect on engine performance. I like this much better than the one- or two-click change on other carburetors.
It also became obvious that the Sport Jett .40 has substantial power. I didn't lean it out all the way, for what I would need for 3-D flying, but it still pulled the Ergo straight up like a rocket. With a little refinement to the high-end mixture, and a change in the pitch curve to handle the added power, I think this will be a real mover. I was also impressed by the transition from idle to full power, as well as the transition back to a steady and dependable idle, right out of the box. More testing and flying needs to be done before Dub or I have confidence in the overall performance of this engine for helicopter use, but Jett Engineering's high quality and performance is evident.
I received a letter from Chris Jerome (Lewisville, NC) that I think will be of interest to those ready to progress to forward flight. With the help of my book, The Basics of Radio Control Helicopters, Second Edition, Chris had been teaching himself to fly, and he was ready for forward flight after reading my March column.
I appreciate Chris's letter because it gives me a better perspective of what it's like to learn forward flight — it has been many years since I was in that position. I have helped many fliers with their progress since then, but Chris's comments are well taken, and they could present you with a different opinion on techniques. I've included a summary and a few comments of my own:
- We agree that a flight simulator does help the learning process.
"It's not really anything like the knee-knocking experience of the real thing, but it does help you to practice the stick movements you need to make," Chris said.
A couple of the flight simulator's real benefits are that it gives you more stick time to progress, and it provides a threat-free environment in which you are not afraid to make a mistake and crash your helicopter. Taking away the fear factor is a big plus.
- "My experience has been that a windless day is much better than the 5–10 mph wind you recommend in your column and in your book," Chris said. "This may be because we very rarely have a steady wind around here; it nearly always gusts a little and changes direction. I found it very hard to get out of forward flight into a hover, close-by and low. Therefore, I would recommend getting used to hovering (and landing) your helicopter at 10–15 feet, and at some distance from you, before you go into forward flight."
I agree — if I had a choice between a gusty day and a calm day, I'd prefer the calm one. However, I recommend a 5–10 mph wind (a steady wind), because it does good things for you and for your helicopter while you are practicing forward flight.
- First, it keeps the helicopter in translational lift, even while hovering. That is good because the engine and rotor system are not working as hard as they would while hovering on a calm day.
- Second, the steady wind slows down the ground speed of the helicopter while it is flying into the wind. This gives you a little time to relax on the upwind portion of the pattern, and it provides big dividends during the landing approach. As the helicopter descends on final, the headwind slows the entire approach, giving you more time to make corrections and reducing the possibility that the helicopter will go sailing as you try to stop its forward flight. Maybe if Chris could find a "steady wind" day, it would help him recover his helicopter a little closer.
- Chris's last point is too long to quote, but he started forward flight by flying figure 8s in front of him. As he improved control of the helicopter, he let the 8s get progressively bigger. Soon, he was in forward flight from one side to the other, and he found that the biggest problems were keeping the speed under control and getting the helicopter down.
The forward speed of the helicopter is determined by the amount of collective (lift) and the fore/aft cyclic. Having too much lift on the rotor system will cause the helicopter to climb, to go fast, or some combination of the two. Therefore, try controlling the model's speed by keeping the attitude flat with cyclic, and controlling altitude with collective. There certainly is interaction between the two, but this way will give you one control movement to make a specific adjustment.
With the helicopter in forward flight, and its extra translational lift, it could be hard to get down if you don't have enough negative collective pitch. I recommend limiting the amount to about -1° while learning to hover, to keep the helicopter from falling out of the sky; but about -3° is needed to get the helicopter down from forward flight. Don't forget to make this needed change to the pitch curve, then practice hovering with the new setting until it feels comfortable before you get the helicopter away from the ground.
The last point that Chris makes is the need to control the tail with the tail rotor. This is especially important for those of you who have been fixed-wing pilots, who rarely use the rudder except to steer the aircraft on the ground. The tail rotor is often used in a helicopter, especially when slow and close to the ground, to keep the nose pointing in the desired direction. In forward flight, the vertical fin acts like the feathers of an arrow, keeping the pointy end going first; but in a hover, especially on the calm days that Chris likes, the vertical fin has no control function.
It's nice to learn what other helicopter fliers agree or disagree about, and to learn about different techniques. That's what makes this hobby so much fun! Certain principles have to be adhered to, but there is room for you to be an individual, and to develop your own likes and techniques. I hope to hear from more of you so I can present your ideas.
Transcribed from original scans by AI. Minor OCR errors may remain.

