
RADIO CONTROL HELICOPTERS
Paul Tradelius, 4620 Barracuda Dr., Bradenton, FL 34208
Ergo Sport 60
Since my last column I've had a chance to fly the Ergo Sport 60 several times, and I continue to be impressed with its flight characteristics and design. Whether in a hover or upstairs doing aerobatics, the helicopter is a solid machine that flies well, and it's easy to see with its large canopy and fin set. However, the stick-on decals do not stay on very well when fuel residue gets on the plastic, so it looks like I'll have to paint mine soon.
Jett Engineering .65 engine
The Jett Engineering .65 engine has also proven to be a top performer. It's similar to the Sport .40 engine I have written about, which is in my Ergo 40. A tremendous amount of power combined with a good idle and transition make the .65 a pleasure to use. However, I continue to have a little trouble starting the engine at times because of its tight AAC fit. If the piston stops at top dead center it's difficult to turn the engine over.
I tried taking a wrench to the starter shaft, but came up with a better technique of using a screwdriver to rotate the fan. I placed the screwdriver at the base of the fan fins and hit it with the palm of my hand. This sudden impact breaks the piston free, then I can continue to start the engine normally. On the one hand, this detracts from using the engine, but on the other hand, it speaks highly of the close tolerances of the engine.
I talked to Dub Jett about this problem and he advised me to send him the engine so that he could "loosen" it slightly. He also said he would make sure that future engines for helicopters will not be as tight, in order to prevent this problem.
Aristo-Craft Seeker receiver
The Seeker receiver by Aristo-Craft has been a non-event; it does nothing but sit there quietly and work. This receiver will tune itself to any FM transmitter in moments without any additional crystals. I have used it with several transmitters, and it works as all receivers are expected to work—with good range and rock-solid performance.
Tiny helicopter from Mainz
I received a nice letter from Bob Harold of West Salem, Wisconsin that contained an article from Mechanical Engineering describing the smallest flying helicopter in the world. The researchers at the Institute for Microtechnology–Mainz in Mainz, Germany have developed a helicopter that is 24 millimeters long, 8 millimeters high, and weighs 400 milligrams. It has two (yes, two) electric motors which drive the dual 13-millimeter rotors to altitudes as high as 130 millimeters. These small electric motors run at 40,000 rpm, but as many as 100,000 rpm are possible.
No name was given to this tiny helicopter, but it was developed to demonstrate the capabilities of a microfabrication process called LIGA, which is based on a combination of lithography, electroforming, and special molding techniques. This technique is one of the most promising and flexible technologies for the mass fabrication of three-dimensional micro products, and will be useful in many medical applications, tiny magnetic disk drives, and displacement drives for use in communications.
Pushrods, setup and the JR Ergo Gas
Terry Pinkley of Columbus, Nebraska called me, and we had a nice conversation about pushrods and their lengths as presented in the instructional manual versus what he uses in flight. Terry built a new JR Ergo Gas for his first helicopter, so he wanted to make sure that everything was just right to have the best-performing helicopter possible while he learns to fly.
However, after adjusting all of the pushrods to the lengths specified in the instructions, the helicopter did not seem to be flying right. A more-experienced flier looked at it and made some adjustments to the pushrods, which made the helicopter fly better, but Terry was concerned because the pushrods were not as specified in the instructions. He called to get my opinion on what to do—readjust to the recommended lengths, or leave the pushrods as they were.
It's hard to get the full picture of Terry's helicopter by talking on the telephone, but I told him that he seemed concerned about the wrong thing. The pushrod lengths in the instructions provide a basic setup for a given servo and flight performance; if Terry's helicopter is set up differently, I expect the pushrod lengths to be slightly different.
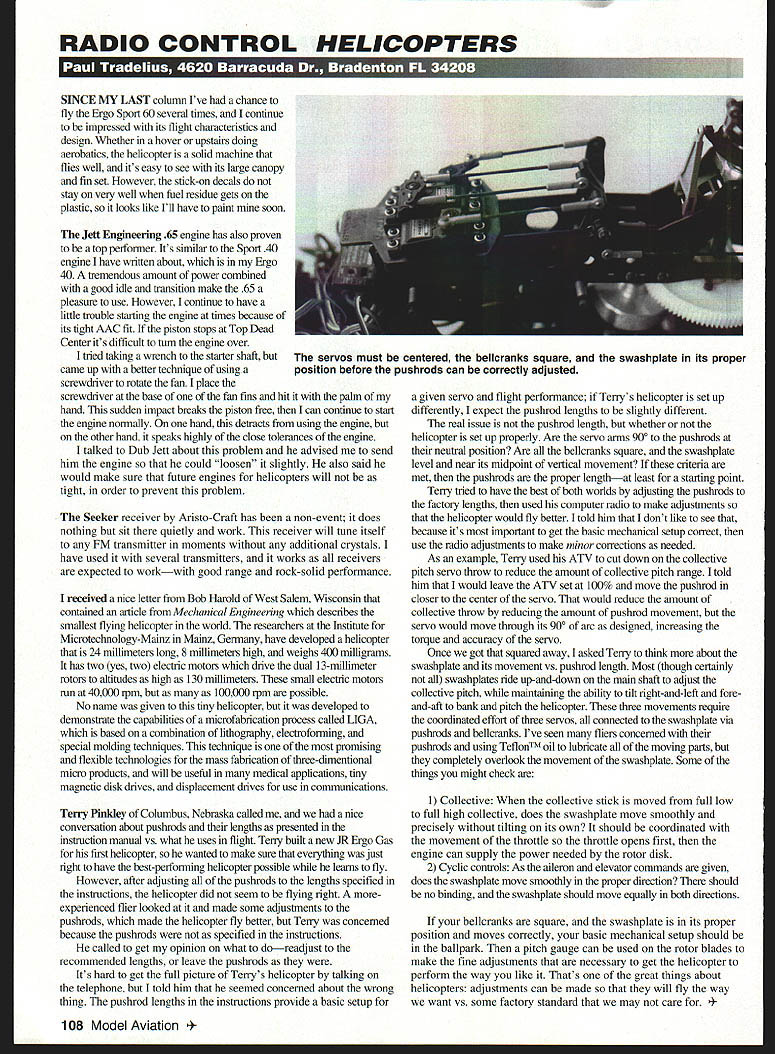
The real issue is not the pushrod length, but whether or not the helicopter is set up properly. Are the servo arms 90 degrees to the pushrods at their neutral position? Are all the bellcranks square, and the swashplate level and near its midpoint of vertical movement? If these criteria are met, then the pushrods are the proper length—at least for a starting point.
Terry tried to have the best of both worlds by adjusting the pushrods to the factory lengths, then used his computer radio to make adjustments so that the helicopter would fly better. I told him that I don't like to see that, because it's most important to get the basic mechanical setup correct and use the radio adjustments to make minor corrections as needed.
As an example, Terry used his ATV to cut down the amount of collective pitch servo throw. I told him that I would leave the ATV set at 100% and move the pushrod in closer to the center of the servo. That would reduce the amount of collective throw by reducing the amount of pushrod movement, but the servo would move through its 90 degrees of arc as designed, increasing the torque and accuracy of the servo.
Once we got that squared away, I asked Terry to think more about the swashplate and its movement versus pushrod length. Most (though certainly not all) swashplates ride up and down on the main shaft to adjust the collective pitch while maintaining the ability to tilt right and left and forward and back to bank and pitch the helicopter. These three movements require the coordinated effort of three servos, all connected to the swashplate via pushrods and bellcranks. I've seen many fliers concerned with their pushrods and using Teflon to lubricate all of the moving parts, virtually overlooking the movement and sensitivity of the swashplate.
Some of the things you might check are:
- Collective: When the collective stick is moved from full low to full high collective, does the swashplate move smoothly and precisely without tilting on its own? It should be coordinated with the movement of the throttle so the throttle opens first, then the engine can supply the power needed by the rotor disk.
- Cyclic: As the aileron and elevator commands are given, does the swashplate move smoothly in the proper direction? There should be no binding, and the swashplate should move equally in both directions.
- If your bellcranks are square, and the swashplate is in its proper position and moves correctly, your basic mechanical setup should be in the ballpark. Then a pitch gauge can be used on the rotor blades to make the fine adjustments that are necessary to get the helicopter to perform the way you like it. That's one of the great things about helicopters: adjustments can be made so that they will fly the way we want versus some factory standard that we may not care for.
Transcribed from original scans by AI. Minor OCR errors may remain.

