
Radio Control: Helicopters
Dave Chesney
This month and the next few, the column will be primarily for beginners. Since many of the columns have described RC helicopter aerobatics, including the "impossible" inverted flight and auto-rotations of our choppers, perhaps I've left out a few notes about the basics. Just how does the darn thing fly? How do I set it up? How do I learn to fly one? How much does it cost? Where do I get one? And the biggie: Why don't you write a book? Those are a few of the questions I heard and, with the exception of the last question, I'll try to answer a few. The answers are not intended to be impressively technical — at best I am a hobbyist, not an aeronautical engineer.
Basic comparison with airplanes
The RC helicopter is not unlike other engine-driven RC aircraft and their full-scale counterparts. Both helicopter and airplane obey the basic laws of flight, and their flight controls are similar, but the helicopter is mechanically more complicated. Since most of us are familiar with radio-control airplanes, let's compare a trainer airplane with a helicopter.
- Airplane: engine + prop for thrust; wings for lift.
- Helicopter: engine + main rotor system for both lift and thrust.
Both use servos to operate controls:
- Airplane servos: control ailerons, elevator, rudder; one servo controls engine speed.
- Helicopter servos: control fore/aft cyclic (longitudinal cyclic), right/left cyclic (lateral cyclic), and the tail rotor; a servo controls rotor speed (throttle) and often the collective pitch.
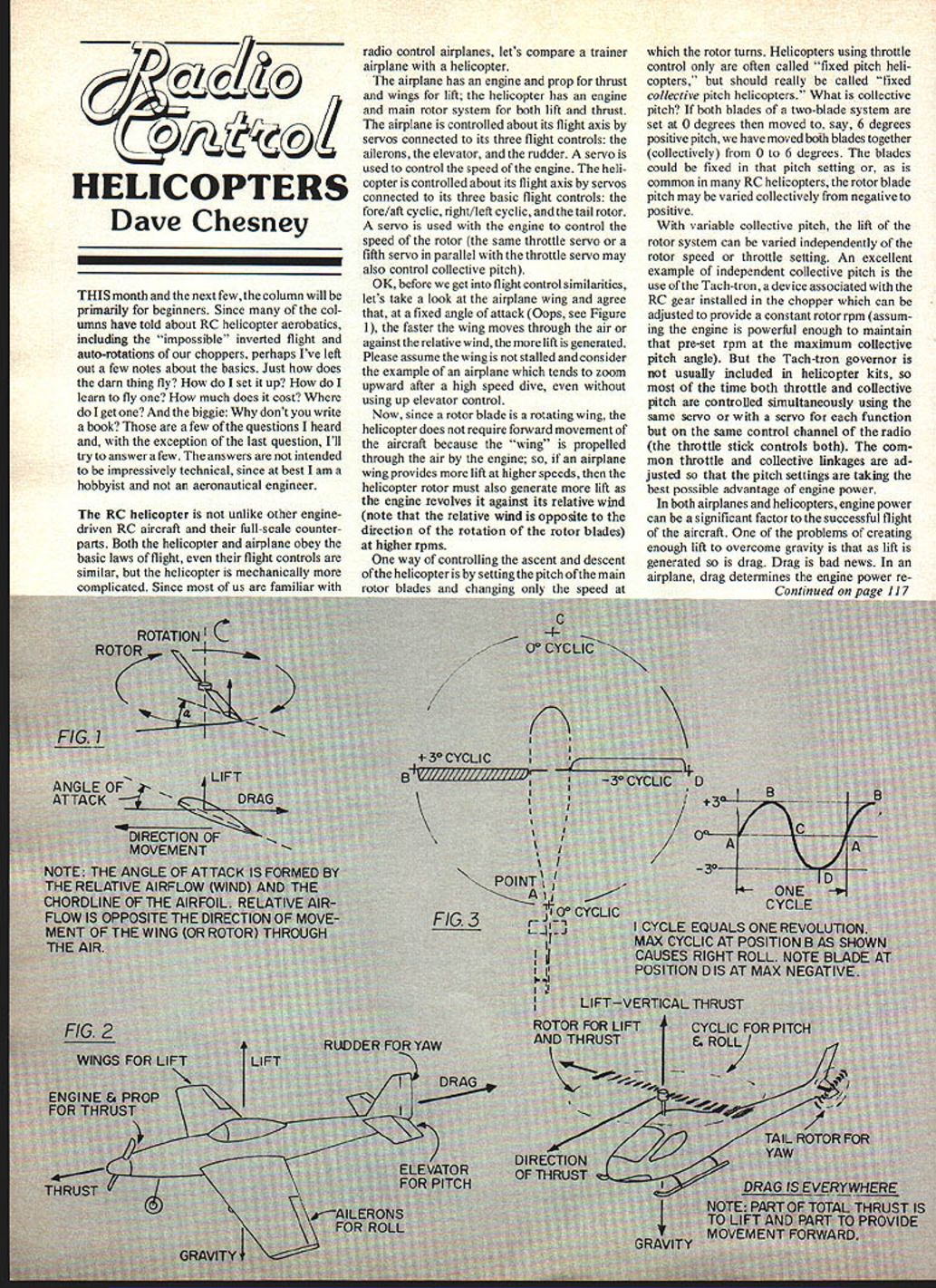
Lift: wings vs. rotor blades
At a fixed angle of attack, the faster a wing moves through the relative wind, the more lift it generates (assuming the wing is not stalled). Since a rotor blade is a rotating wing, the helicopter does not require forward motion of the aircraft to generate lift — the engine propels the rotor blade through the air. Thus, a rotor will generate more lift at higher RPMs, just as a wing generates more lift at higher airspeed.
One way to control ascent and descent is by setting the pitch of the main rotor blades and changing only the rotor speed. Helicopters that use throttle control only are often called "fixed pitch helicopters," but a more precise term is "fixed collective pitch helicopters."
Collective pitch and throttle
- Collective pitch: moving all rotor blades together to change their pitch (for example, shifting both blades from 0° to +6°). Collective may be fixed or variable.
- Variable collective pitch: lets you change rotor lift independently of rotor speed. Many RC helicopters vary collective pitch from negative to positive.
- Tach-tron (governor): a device that can be adjusted to provide a constant rotor RPM (assuming sufficient engine power). The Tach-tron is not usually included in kits.
- Typical RC setup: throttle and collective pitch are often controlled simultaneously — either with the same servo or with two servos on the same radio channel (throttle stick controls both). Linkages are adjusted so pitch settings best use available engine power.
Power, drag, and mechanics
Engine power is a significant factor for successful flight. Generating lift also produces drag, and drag determines the engine power required to pull the wing (or rotor) through the air fast enough to get and keep the aircraft aloft.
Airplane drag is primarily:
- Induced drag from creating lift, and
- Parasitic/profile drag from bumps, wheels, canopies, etc.
Helicopters face those plus:
- Mechanical drag from the drive train. Binds or excessive friction in the gearing can rob power, so assemble the mechanics carefully to minimize friction.
Controls in forward flight
When both helicopter and airplane are moving forward, control responses are similar:
- Roll axis:
- Airplane: ailerons increase/decrease lift at the wingtips.
- Helicopter: right/left or lateral cyclic produces roll/bank.
- Pitch axis (nose up/down):
- Airplane: elevator — down elevator drops the nose, up elevator raises it.
- Helicopter: fore/aft or longitudinal cyclic — forward cyclic pitches the nose down, aft cyclic pitches the nose up (in forward flight).
- Yaw axis (nose left/right):
- Airplane: rudder controls yaw.
- Helicopter: tail rotor controls yaw.
Note: Some RC helicopter pilots reverse the tail-rotor linkage so that a right-stick input gives opposite tail-boom movement; this mirrors some full-scale helicopters. For training, set up "normal" yaw control initially.
Hover and low-speed flight
Unlike an airplane, a helicopter can stop, move rearward, or slide sideways because the rotor provides the relative airflow. With sufficient engine power, rotor pitch, and RPM, a helicopter can lift off and hover. In hover:
- Lateral and longitudinal cyclic slide the helicopter left/right and forward/rearward.
- The tail rotor is used both for yaw control and to prevent the fuselage from spinning opposite the main rotor rotation.
What is cyclic pitch?
Cyclic pitch changes cause lateral and longitudinal movement. A cyclic input makes the pitch of each blade vary during rotation: one blade oscillates from a collective reference pitch to a relative positive pitch, back to the reference, then to a relative negative pitch, and back again. As one blade reaches its highest pitch, the opposite blade is at its lowest. The pitch excursion of a blade over one revolution resembles a sine wave.
Next month I will cover more about cyclic and collective pitch and the rotor head and swash plate.
Dave Chesney Rt. 9, Box 621A, Greensboro, NC 27409.
Transcribed from original scans by AI. Minor OCR errors may remain.

