
RC Flying Today
George M. Myers 70 Froehlich Farm Road, Hicksville, NY 11801
Abstract:
- What is MOM?
- Why mix controls?
- Setting up the mixers
- What does MOM do?
WHAT IS MOM?
MOM (Master Onboard Multi-mix) is a device intended to be placed between a receiver and an array of servos. Its function is to mix control signals.
MOM permits you to define servo travel end-points (span), neutral position, travel direction (reversing), and linearity (from linear to exponential, or a range of curvatures) independently from the transmitter. It also permits you to mix signals. Each mixture can be defined in terms of master/slave, direction, and degree (i.e., the percentage of the mixed signal that shows up in the slave channel).
Where else can you buy six mixers for $125?
MOM was invented in England, developed in the United States, and patented in both countries. The governing concept for MOM was that the only things that belong on a transmitter are the levers that fly the airplane (rudder, elevator, ailerons, throttle, flaps, gear, etc.). I have the first version of MOM, which is a six-mixer device. It is out of production. A new, eight-mixer version will soon be available.
WHY MIX CONTROLS?
Mixing extends your control over the airplane. Helicopter fliers were the first to adopt mixers. Now they're not going to leave home without them. Sailplane fliers say that mixers are essential to winning. "Crow" on sailplanes is as common as tail-rotor mixing on helicopters.
No doubt about it, mixers are an additional complication when you are setting up an airplane for its first flight. But once you have mastered them, they make flying much simpler and more dependable.
Why do I keep talking about control mixing, and what kind of control mixing am I talking about? V-tail (rudder and elevator functions mixed) is one kind; crow ailerons is another.
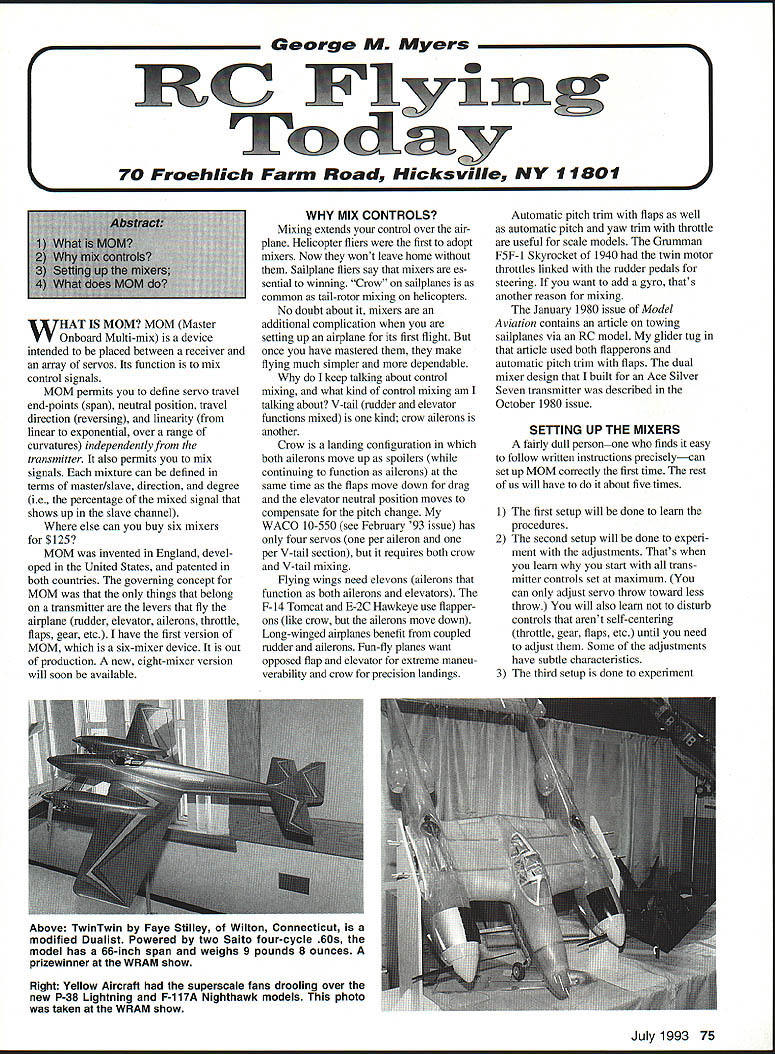
Crow is a landing configuration in which both ailerons move up as spoilers (while continuing to function as ailerons) at the same time as the flaps move down for drag and the elevator neutral position moves to compensate for the pitch change. My WACO 10-550 (see February '93 issue) has only four servos (one per aileron and one per V-tail section), but it requires both crow and V-tail mixing.
Flying wings need elevons (ailerons that function as both ailerons and elevators). The F-14 Tomcat and E-2C Hawkeye use flapperons (like crow, but the ailerons move down). Long-winged airplanes benefit from coupled rudder and ailerons. Fun-fly planes want opposed flap and elevator for extreme maneuverability and crow for precision landings.
Automatic pitch trim with flaps as well as automatic pitch and yaw trim with the throttle are useful for scale models. The Grumman F5F-1 Skyrocket of 1940 had the twin motor throttles linked with the rudder pedals for steering. If you want to add a gyro, that's another reason for mixing.
The January 1980 issue of Model Aviation contains an article on towing sailplanes via RC. My glider tug in that article used both flapperons and automatic pitch-trim flaps. The dual mixer design that I built for an Ace Silver Seven transmitter was described in the October 1980 issue.
SETTING UP THE MIXERS
A fairly dull person—one who finds it easy to follow written instructions precisely—can set up MOM correctly the first time. The rest of us will have to do it about five times.
- The first setup will be done to learn the procedures.
- The second setup will be done to experiment with the adjustments. That's when you learn why to set all transmitter controls at maximum. (You can only adjust servo throw toward less throw.) You will also learn not to disturb controls that aren't self-centering (throttle, gear, flaps, etc.) until you need to adjust them. Some of the adjustments have subtle characteristics.
- The third setup is done to experiment further.
- The fourth setup might produce a flyable airplane.
- The fifth setup might produce a better configuration.
I found that I had to have at least a test instrument by mounting a servo on a protractor and attaching a pointer to the servo shaft. It gave me a way to measure and record my adjustments.
Programming MOM is like working with a new piece of software. You must learn to follow specific procedures when giving commands, and you must learn to read MOM's flash and beep codes. They can give you a lot of information when you understand them and confuse you when you don't.
What happens next depends on your personality. If you are the type who wants to get the most out of everything, then you will develop alternate control setups to fill the remaining memories (total of three).
When MOM is filled, you have only two choices. Either buy another one, so you can save the hundreds of steps in the work already done, or you will decide that you now know how to do it over whenever necessary, so you will erase something. That's a bit like saying, "I don't need a copy of last year's income tax because I figured it out then."
Most folks who use MOM probably will dedicate it to just one airplane. If they are used at all, the extra memories will probably be used to set up alternate configurations for the same airplane. This brings up a shortcoming of MOM: you can't change configuration in flight, as you can with the super transmitters.
MOM's major annoyance is that you can't save a setup anywhere outside MOM. Dave Abbe is investigating how to use a pocket calculator to create and save the setups, for downloading into MOM. He expects to have it with MOM Mk. 2 (or whatever it is called). If so, I want it.
WHAT DOES MOM DO?
- It allows you to set servo reversing, neutral position, and each end of the control throw independently, plus exponential curve shaping for all self-centering proportional controls. You make all these adjustments using only the control sticks on the transmitter. There is no need to have dedicated switches on the transmitter that you only use in the life of the plane. The same statement applies to all the following features.
- It allows you to set servo reversing and each end of the control throw independently, for all proportional noncentering controls (e.g., throttle).
- It allows you to set servo reversing for switched controls.
- It allows you to mix any control, or any set of mixed controls, with any other control or control mixture, six ways (eight for the Mk. 2 version) for each configuration.
- It saves three configurations.
- MOM also contains a relay that can operate a camera, ignite a glow plug, start an electric motor, turn on landing lights, ignite a smoke bomb, deploy a parachute, or do whatever else you can do with a switch.
- It remembers all the above, even when no battery is connected.
- It warns you when your battery is low.
- It lets you listen for interference on your channel via a built-in speaker and counts the number of interference hits you had in flight (up to 10).
- It tells you when you forget to turn off the receiver.
- It beeps as a lost-airplane finder when you make one of your off-field landings.
- It can go into a fail-safe mode (LSC) when the control signal is lost.
I don't think many people will set up the fail-safe LSC (loss-of-signal compensator) even though it could have saved my WACO from its last crash. My plane was close to the ground, and I was thinking about landing when someone switched on a transmitter on my channel. I had time to yell "Channel 14—I'm hit!" but the other guy didn't shut off in time. If the LSC had been enabled, the plane might have continued on its path, out of control, long enough for him to come to his senses and shut off his transmitter.
What we have here is the essential dilemma of RC aviation. Is it better to fly over empty spaces and crash immediately, or is it better to have the airplane continue on, out of control, until the interference situation is cleared?
People argue several ways. Selfishly, one wants his plane to continue on, undamaged, until control is reestablished, even though the flight path may threaten other people's lives and property. Prudently, an immediate crash into vacant land upon loss of control is better than a delayed crash into people or property. Rationally, a controlled crash usually does less damage than an uncontrolled crash. Logically, we can't guarantee that the robot we call fail-safe will produce a controlled crash.
Surrendering control to anything or anyone goes against the essence and reason for RC flying. We fly RC because we want control. We'd really prefer an immediate crash when something tries to take control away from us. That's why I doubt that many people will program the LSC.
Dave Abbe says that if you don't program LSC, the control responses usually only get messy in the presence of interference. I say that depends on the interference. Dave is considering doing away with LSC and tightening the transmitter characterization that MOM does in the calibration process.
MOM offers a lot of control for a little money and some time invested in learning how to use it. Add MOM to a simple system (no dual rates, reversing switches, or mixers), and you get as many features as a super system, at much less cost.
Transcribed from original scans by AI. Minor OCR errors may remain.

