

RC Flying Today: Preflight Evaluation of a Fascinating New Toy
By Myers
ABSTRACT
Basic nondestructive test procedures for electric-powered models, using the Baron Whisper Electric Helicopter as an example. Several design features are described and analyzed.
I went to the KRC Electric Fun Fly, near Quakertown, PA, on September 15–16, 1990. It was an exceptionally pleasant affair, as usual. While there I saw Dave Hyatt demonstrate the Kalt Baron Whisper, a new addition to the respected Baron Helicopter series, which ranges from the Baron 28 through the Baron 60. Two days later, Dick DeFrancis of Action Hobbies, Selden, NY, sent a Whisper kit to the meeting of SEFLI (Silent Electric Flyers of Long Island). The idea was to make the kit available for inspection. I inspected it and bought it. Three days later, the Whisper was ready for flight.
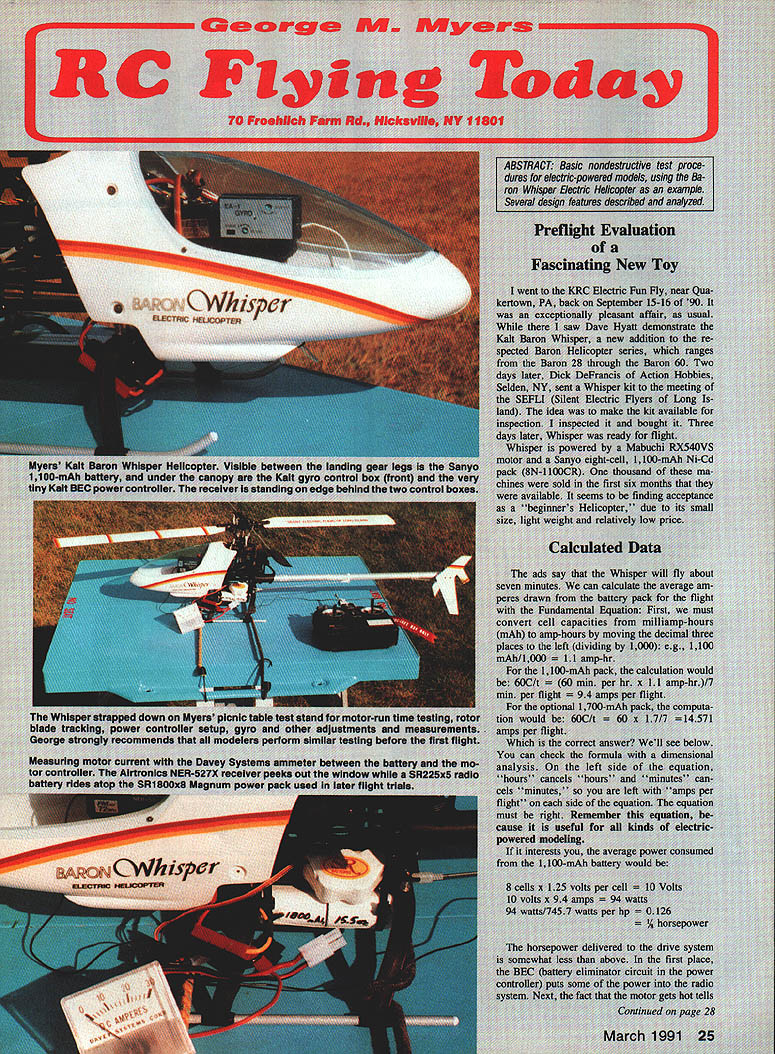
The Whisper is powered by a Mabuchi RX540VS motor and a Sanyo eight-cell, 1,100‑mAh Ni‑Cd pack (8N‑1100CR). One thousand of these machines were sold in the first six months they were available. It seems to be finding acceptance as a "beginner's" helicopter due to its small size, light weight and relatively low price.
Calculated Data
The ads say that the Whisper will fly about seven minutes. We can calculate the average amperes drawn from the battery pack for the flight with the Fundamental Equation. First, convert cell capacity from milliamp-hours (mAh) to amp-hours by moving the decimal point three places to the left (dividing by 1,000): e.g., 1,100 mAh / 1,000 = 1.1 amp‑hr.
- For the 1,100‑mAh pack:
60 (min/hr) × 1.1 amp‑hr / 7 min/flight = 9.4 amps per flight.
- For the optional 1,700‑mAh pack:
60 × 1.7 / 7 = 14.57 amps per flight.
You can check the formula with dimensional analysis: hours cancel and minutes cancel, leaving amps per flight on each side. Remember this equation — it is useful for all kinds of electric-powered modeling.
If it interests you, the average power consumed from the 1,100‑mAh battery would be:
- 8 cells × 1.25 volts per cell = 10 volts
- 10 volts × 9.4 amps = 94 watts
- 94 watts / 745.7 watts per hp = 0.126 horsepower
The horsepower delivered to the drive system is somewhat less than the above. The BEC (battery eliminator circuit in the power controller) puts some power into the radio system. The motor also gets hot, so some power is lost as heat. The remaining power goes to the shaft. To know shaft horsepower, you must measure shaft torque and shaft rpm and apply:
- HP = (T × RPM) / 633,600 (using T in inch‑ounces)
Test Procedures, Data and Analyses
Advertised data usually requires some interpretation. In order to get some data of my own, I mounted the helicopter on my picnic table with elastic bungee cords. When you do this, you can power the helicopter and it will be held captive, with limited freedom to move about, while you exercise the controls.
I proceeded to track the blades, adjust the power controller and gyro, and measure some operating currents. With my Davey Systems 0–30 amp meter (available at your hobby shop for about $30) in series with the battery and the motor, I found:
- Minimum motor current = 4 amps
- Liftoff = 12 amps
- Full throttle = 20 amps
This data applies when the main rotor blades are set for the angles that the linear Throttle/Collective mixing in my transmitter gave them, operating with the nonlinear servo-arm arrangement specified in the Whisper instruction manual.
Once the helicopter is out of ground effect and moving forward, experience shows power can be reduced while maintaining level flight. But if this machine spends all its time hovering, we can expect:
(60C) / A = t (Fundamental Equation, rearranged)
which is: (60 min/hr × 1.1 amp‑hr) / 12 amps = 5.5 minutes — or less. (See below for why it may be less.)
Experience (and Bob Kopski) teaches that battery weight should be at least one‑fourth of the launch weight for any electric model powered by Ni‑Cd batteries. My Sanyo 1,100‑mAh pack weighs 11.5 oz., and the complete helicopter weighed 42 oz. at liftoff. So, the ratios look about right. (I don't know how Kalt got the Whisper's weight down to the advertised 2 lb. 2 oz., unless they weighed their helicopter without the battery.)
If you think my scale might be off, remember how easy it is to check a scale's calibration: one fluid ounce of water weighs one ounce; one pint of water (16 fl. oz.) weighs one pound. My scale is correct.
Why concentrate on weight? Any added weight results in reduced flight time.
The airborne RC system is powered by the BEC in the Kalt motor controller, which delivers 260 mA at 6.44 VDC to the airborne RC system when the battery is fully charged and nothing is moving but the gyro. Each servo can increase that current by up to 400 mA if it's stalled.
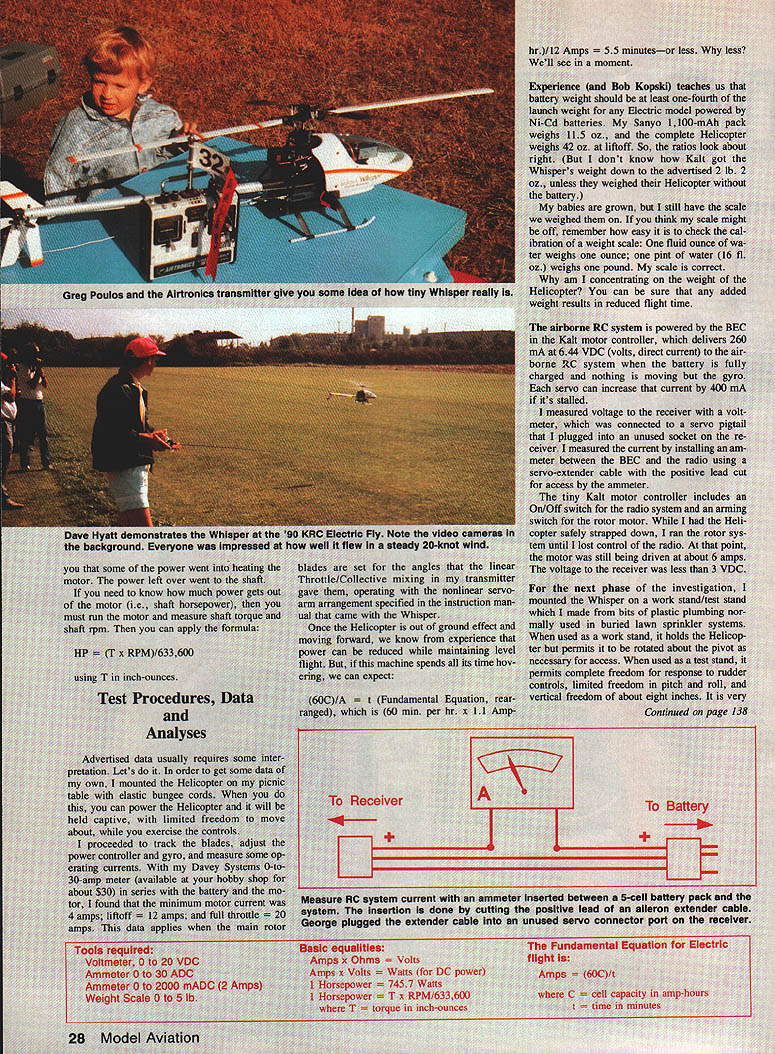
I measured voltage to the receiver with a voltmeter connected to a servo pigtail plugged into an unused socket on the receiver. I measured current by installing an ammeter between the BEC and the radio using a servo‑extender cable with the positive lead cut for access by the ammeter.
The tiny Kalt motor controller includes an ON/OFF switch for the radio system and an arming switch for the rotor motor. While I had the helicopter safely strapped down, I ran the rotor system until I lost radio control. At that point, the motor was still being driven at about 6 amps. The voltage to the receiver was less than 3 VDC.
For the next phase of the investigation, I mounted the Whisper on a work/test stand I made from bits of plastic plumbing normally used in buried lawn sprinkler systems. When used as a work stand, it holds the helicopter but permits rotation about the pivot as necessary for access. When used as a test stand, it permits complete freedom for response to the controls, limited freedom in pitch and roll, and vertical freedom of about eight inches.
Tools required
- Voltmeter, 0 to 20 VDC
- Ammeter, 0 to 30 ADC
- Ammeter, 0 to 2000 mADC (2 amps)
- Weight scale, 0 to 5 lb
Basic equalities
- Amps × Ohms = Volts
- Amps × Volts = Watts (for DC power)
- 1 horsepower = 745.7 watts
- 1 horsepower = (T × RPM) / 633,600 where T = torque in inch‑ounces
The Fundamental Equation for Electric flight
- Amps = (60C) / t where C = cell capacity in amp‑hours and t = time in minutes
It is handy for getting the trims right before the first attempt at flight. (Photos next month.)
During "test flights" on the stand, I found that the battery voltage after the Whisper lost the power to lift off was 10.0 VDC (1.25 VDC per cell, no load). At that voltage, I still had radio control and could shut off the electric motor from the transmitter. Some battery eliminator circuits shut off the propulsion motor before the battery voltage drops too low for the RC system to operate. This one doesn't.
Given that the helicopter loses the ability to remain airborne before the RC system loses the ability to control power, an auto‑cutoff isn't necessary. Data from the test stand, backed by reports from other owners, shows you can expect about five minutes flying time per charge from the 1,100‑mAh pack.
The fact that the rotor can be powered when the radio isn't in control is a concern. If the helicopter drops into weeds while under power, the main rotor might jam. When you jam the main rotor while the motor is at full power, you strip gears in the transmission. There is no clutch. The gears may not strip at lower current, so the rotor could still be powered when someone picks up the helicopter before the main battery is disconnected, risking injury or further damage. This is one reason fuses are recommended for electric models. The Kalt setup problem is probably because initial maximum drain is 20 amps while the current available at the end of charge is less. Warn your friends to disconnect the battery before handling the helicopter — or any other electric-powered model. Pushing the power switch off turns off the motor — but don't depend on it.
Construction Notes
You must supply a receiver with four micro servos for this helicopter, plus the micro motor controller and the micro gyro available from Kalt.
Assembly and First Setup
My first setup used my 1984 Airtronics CS‑5H radio system (upgraded to 1991 specs by Airtronics) with the Kalt gyro and power controller, plus a mix of Airtronics, Futaba and Novak servos (because I had them, and changing the pigtails was not a problem for me).
The instructions were excellent. Read the add-on pages 2, 3 and 4 before you start building so you won't have to undo any work (particularly on the landing gear). There are good instructions for setting up the power controller. Follow them.
I installed the receiver, motor controller and gyro control box with Velcro, which seems to work well. The gyro itself was stuck down with the double‑sided foam tape provided by Kalt. Servos were mounted with the 2 mm hardware provided; I needed tweezers and a magnifying glass to do it. The only semi‑difficult parts of the construction were putting nuts on the servo mounting screws and assembling the scissor‑arm assembly on the main rotor shaft. I managed to put the scissors on upside down, which necessitated doing it over again.
You have to work with many tiny nuts, bolts and parts. I built the kit inside the cover of the box, and I laid a white pillowcase on the bottom so none of the parts would be lost. Those were two good ideas. It's possible to waste a lot of time looking for a black 2 mm nut in a rug!
(To be continued)
Transcribed from original scans by AI. Minor OCR errors may remain.

