
RC Helicopters 2014/06
Author
Chris Mulcahy cspaced@gmail.com
Dissecting helicopter setup and terminology
Learning to fly model helicopters can be challenging. Add to that the lingo that comes with helis, and it can be somewhat confusing to a beginner. Compounding this are the many RTF helicopters now available, which are perfect for getting into the air quickly, but the pilot misses out on the education that he or she could get from building an aircraft from a kit.
I often receive requests to explain terminology and for correct helicopter setup techniques, so I decided to attempt to break down some terms for those who wish to learn. For the purposes of this column, I’ll be discussing setup techniques that can be used for most 3-D helicopters.
In 3-D, the helicopter uses a variable-pitch rotor head. This means that the pitch of the rotor blades can change from a negative to a positive value. If it changes from -12° to +12°, for example, giving 24° of usable pitch (this varies between helis), this is known as the collective-pitch range. We change this value using the throttle stick on our transmitters with -12 being the stick at its lowest position, and +12 being at the stick’s highest position.
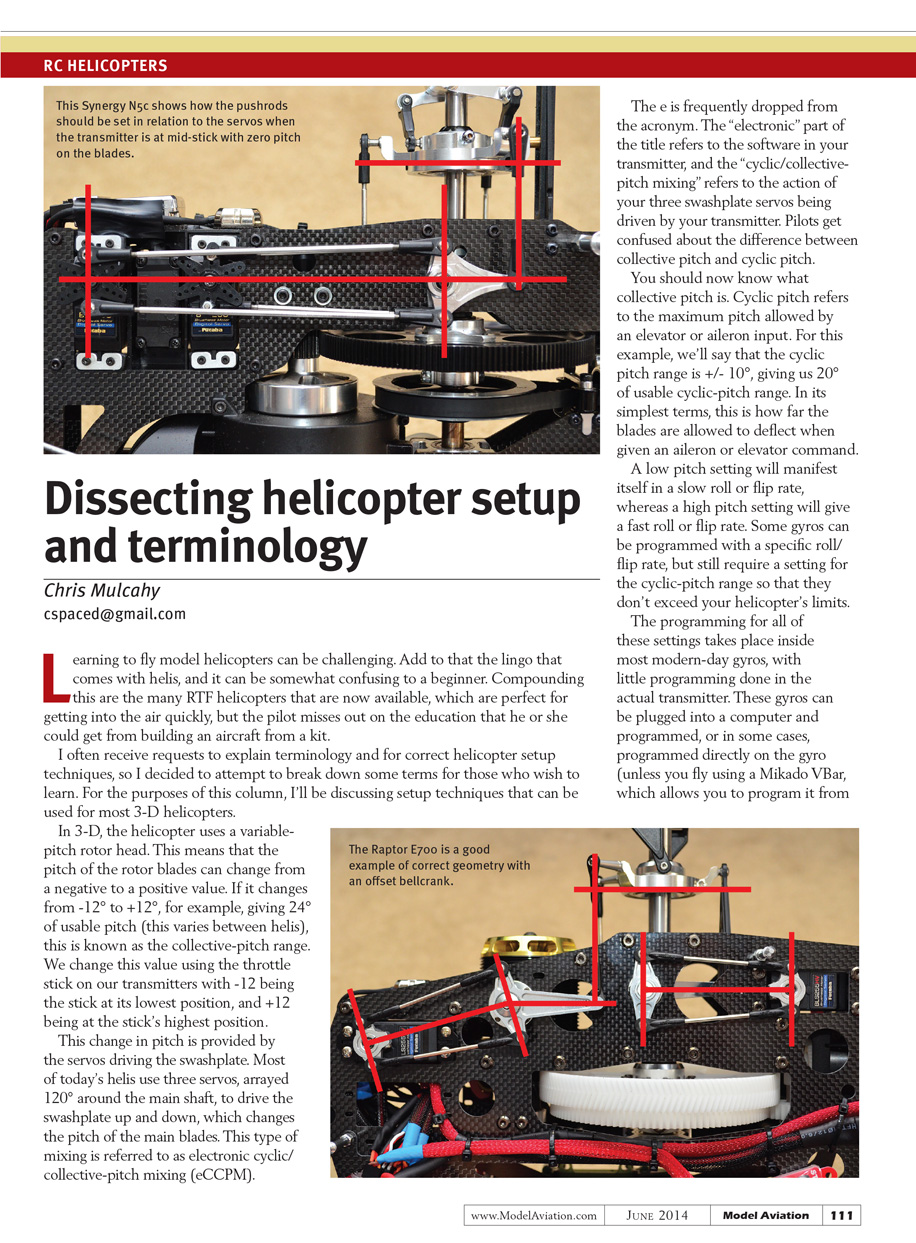
This change in pitch is provided by the servos driving the swashplate. Most of today’s helis use three servos, arrayed 120° around the main shaft, to drive the swashplate up and down, which changes the pitch of the main blades. This type of mixing is referred to as electronic cyclic/collective-pitch mixing (eCCPM).
The “e” is frequently dropped from the acronym. The “electronic” part refers to the software in your transmitter, and the “cyclic/collective-pitch mixing” refers to the action of your three swashplate servos being driven by your transmitter. Pilots often get confused about the difference between collective pitch and cyclic pitch.
You should now know what collective pitch is. Cyclic pitch refers to the maximum pitch allowed by an elevator or aileron input. For this example, we’ll say that the cyclic pitch range is +/- 10°, giving us 20° of usable cyclic-pitch range. In its simplest terms, this is how far the blades are allowed to deflect when given an aileron or elevator command.
A low pitch setting will manifest itself in a slow roll or flip rate, whereas a high pitch setting will give a fast roll or flip rate. Some gyros can be programmed with a specific roll/flip rate, but still require a setting for the cyclic-pitch range so that they don’t exceed your helicopter’s limits.
The programming for all of these settings takes place inside most modern-day gyros, with little programming done in the actual transmitter. These gyros can either be plugged into a computer and programmed, or in some cases programmed directly on the gyro itself (unless you fly using a Mikado VBar, which allows you to instead program it all from the Mikado transmitter).
Initial setup procedure
When setting up a new helicopter, begin with the collective-pitch range. The setup procedure is the same for a sport or 3-D helicopter.
- Set the pitch curve in your transmitter to linear. On many transmitters this appears as a straight, diagonal line from the bottom left to the top right.
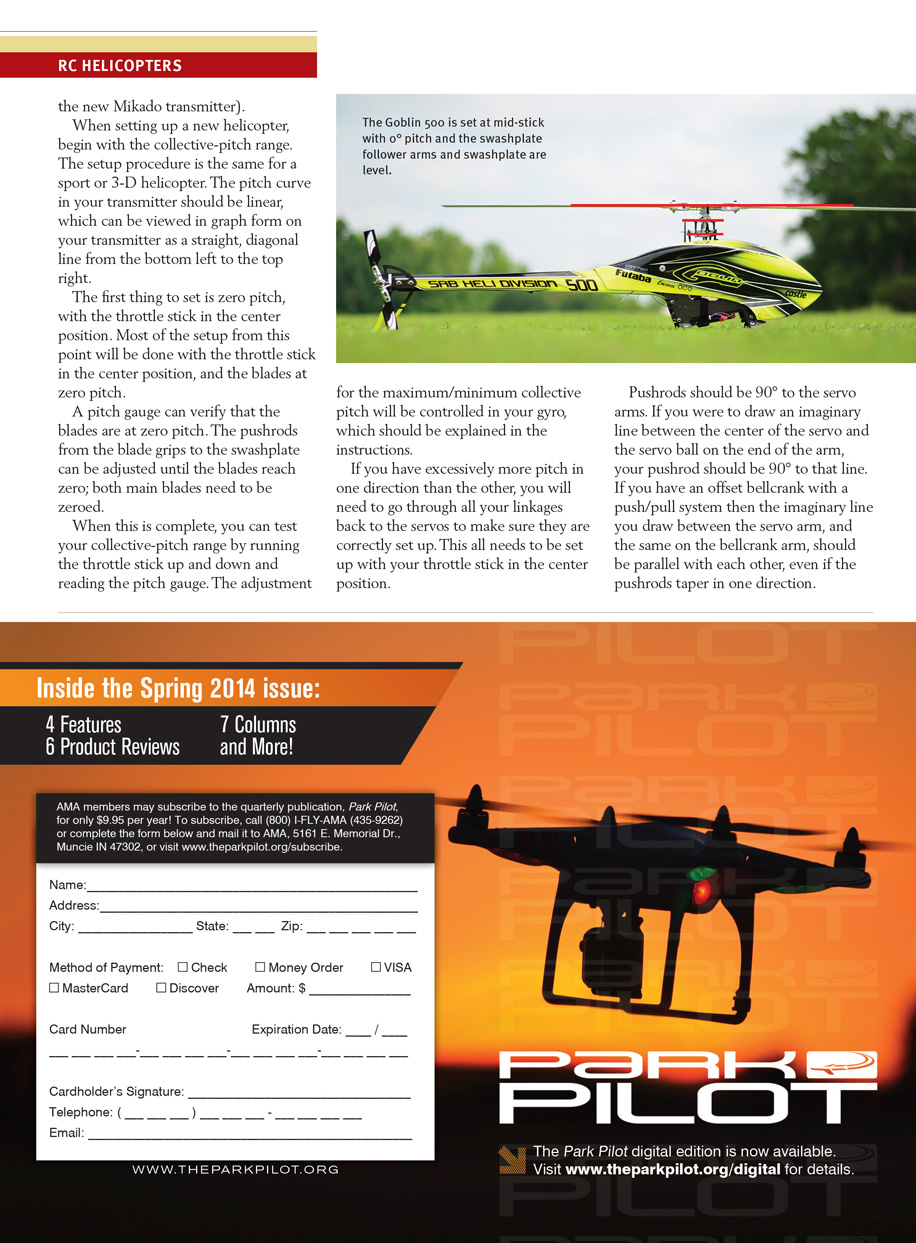
- Set zero pitch with the throttle stick in the center position. Most of the setup from this point will be done with the throttle stick in the center position and the blades at zero pitch.
- Use a pitch gauge to verify the blades are at zero pitch. Adjust the pushrods from the blade grips to the swashplate until both main blades read zero.
- Test the collective-pitch range by running the throttle stick up and down while reading the pitch gauge. Adjust maximum/minimum collective pitch in your gyro as explained in its instructions.
If you have excessive pitch in one direction compared to the other, go through all your linkages back to the servos to ensure they are correctly set up. This all needs to be set up with your throttle stick in the center position.
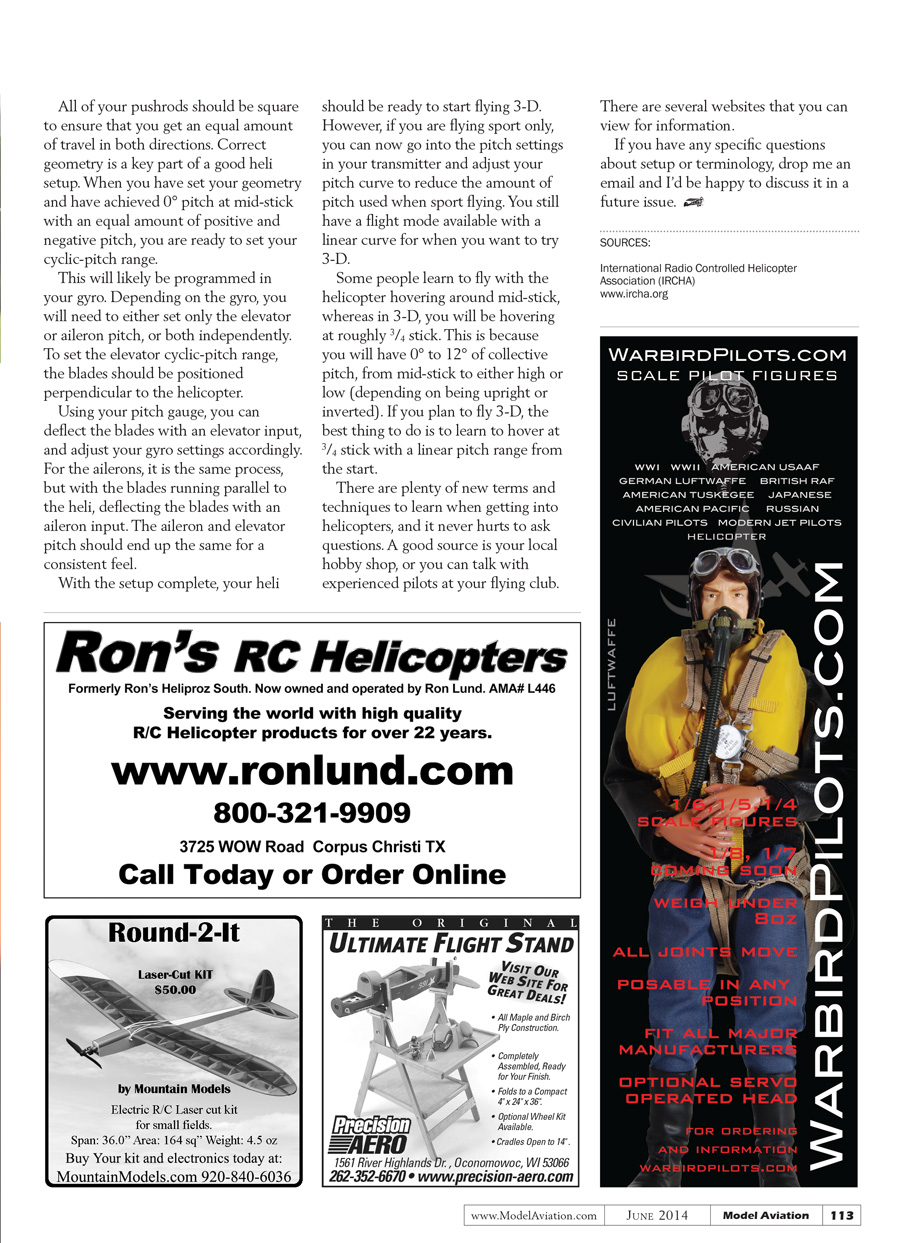
Pushrods should be 90° to the servo arms. If you draw an imaginary line between the center of the servo and the servo ball on the end of the arm, your pushrod should be 90° to that line. If you have an offset bellcrank with a push/pull system, then the imaginary line you draw between the servo arm and the corresponding bellcrank arm should be parallel, even if the pushrods taper in one direction.
Setting cyclic pitch (elevator and aileron)
This will likely be programmed in your gyro. Depending on the gyro, you may need to set only the elevator or aileron pitch, or both independently.
- To set the elevator cyclic-pitch range, position the blades perpendicular to the helicopter. Using your pitch gauge, apply an elevator input and adjust your gyro settings so the pitch deflection matches your desired range.
- To set the aileron cyclic-pitch range, position the blades parallel to the helicopter and repeat the process using an aileron input.
The aileron and elevator pitch should end up the same for a consistent feel. Some gyros allow independent adjustment; others apply the same limits to both axes.
With the setup complete, your heli should be ready to start flying 3-D. However, if you are flying sport only, you can now go into the pitch settings in your transmitter and adjust your pitch curve to reduce the amount of pitch used when sport flying. You still should keep a flight mode available with a linear curve for when you want to try 3-D.
Some people learn to fly with the helicopter hovering around mid-stick, whereas in 3-D you will be hovering at roughly 3/4 stick. This is because you will have 0° to 12° of collective pitch from mid-stick to either high or low (depending on being upright or inverted). If you plan to fly 3-D, the best thing to do is learn to hover at 3/4 stick with a linear pitch range from the start.
There are plenty of new terms and techniques to learn when getting into helicopters, and it never hurts to ask questions. A good source is your local hobby shop, or you can talk with experienced pilots at your flying club. There are several websites you can view for information.
If you have any specific questions about setup or terminology, drop me an email and I'd be happy to discuss it in a future issue.
SOURCES
- International Radio Controlled Helicopter Association (IRCHA)
Transcribed from original scans by AI. Minor OCR errors may remain.

