
Scimitar Bellcrank
— Robert Balsie
The control problem
One aspect of control-line models that has always been a problem is the control system. If the builder is striving for maneuverability, it is often too sensitive to allow the airplane to be easily controlled. On the other hand, if the builder is trying to produce a plane that is stable and easy to handle, the model will probably lack sensitivity.
An article in Pro‑Stunt News stated that most beginners try to use a control system that is too sensitive for their abilities, and suggested configuring the control system to give reduced response for smoother control. This is a good idea, but as the flier's skill increases the airplane will likely lack the necessary sensitivity, forcing the builder to build another airplane with a more sensitive control system.
In most portions of control-line flight, the control system doesn't have to generate much control-surface movement to produce the desired maneuver. A precision aerobatics model, for instance, typically has three flight modes: level flight, round maneuvers, and square corners.
- For rock‑solid level flight the pilot may only need to adjust the controls one or two tenths of a degree as the plane travels around the circle. This is difficult and usually results in the plane "hunting" or slowly drifting up and down.
- Some builders attempt to compensate by building slop into the elevator linkage so the plane is controlled by small flap movements in level flight while larger handle movements engage the elevator. Others make the elevators thinner than the stabilizer so they remain partially out of the airstream. Both methods can be effective but result in non-linear control response.
- Circular maneuvers (like loops) usually require only a few degrees of control-surface deflection. Reducing system sensitivity can make round maneuvers easier but will make "following" maneuvers more difficult.
- Square corners require large, abrupt control deflection; returning to straight flight after a corner is the real problem — a small error in repositioning the handle can cause overshoot, bobble, or a corner that is not 90°.
After dealing with this sensitivity/controllability tradeoff for years, I designed a new type of control system that gives reduced sensitivity for smooth control while still providing adequate response for maneuverability. I call it the Scimitar bellcrank, named because the two curved slots resemble the curved swords.
Analysis of the conventional system
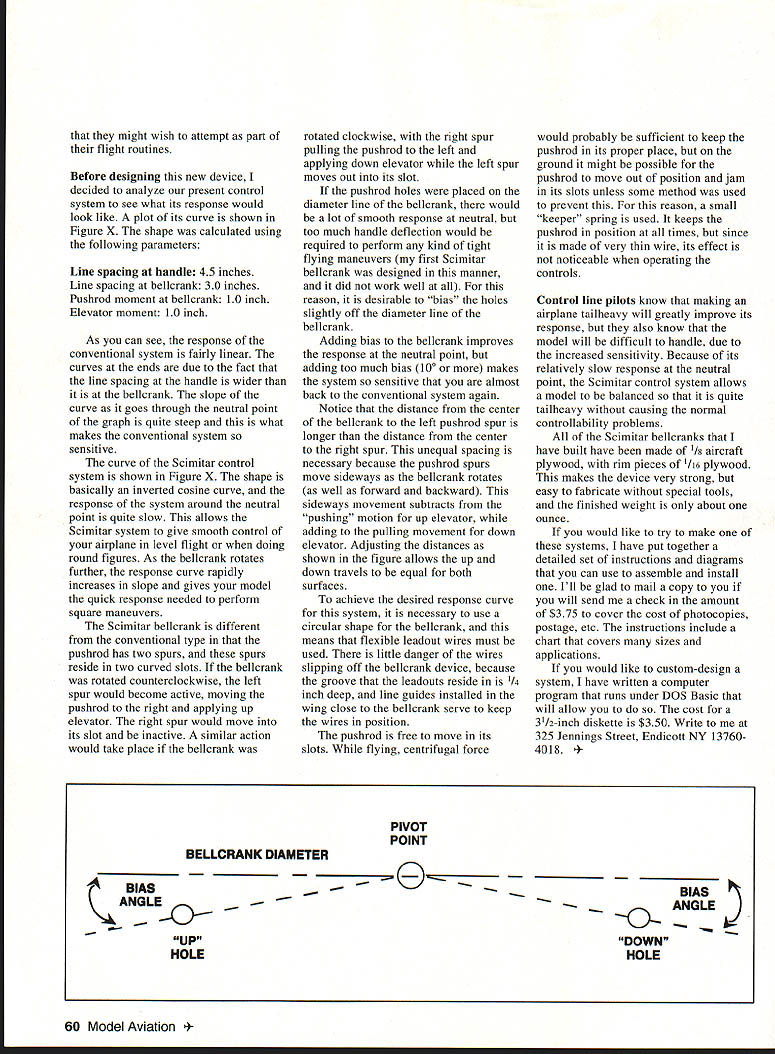
Before designing the new device, I analyzed the conventional control system and plotted its response curve (see Figure 2). The shape was calculated using these parameters:
- Line spacing at handle: 4.5 inches
- Line spacing at bellcrank: 3.0 inches
- Pushrod moment at bellcrank: 1.0 inch
- Elevator moment: 1.0 inch
The conventional system response is fairly linear; the curves flatten at the ends because the line spacing at the handle is wider than at the bellcrank. The slope of the curve through the neutral point is quite steep, which is what makes the conventional system sensitive.
The Scimitar concept and response
The Scimitar control system is shown in Figure 3. Its response curve is basically an inverted-cosine shape: around the neutral point the response is quite slow, allowing smooth control in level flight and for round figures. As the bellcrank rotates further, the response curve rapidly increases in slope, providing the quick response needed for square maneuvers.
How it works
- The Scimitar bellcrank differs from the conventional type by having the pushrod with two spurs that reside in two curved slots.
- If the bellcrank rotates counterclockwise, the left spur becomes active, moving the pushrod to the right and applying up elevator while the right spur moves into its slot and is inactive.
- If the bellcrank rotates clockwise, the right spur pulls the pushrod to the left and applies down elevator while the left spur moves into its slot and is inactive.
- If the pushrod holes were placed exactly on the bellcrank diameter, the neutral response would be very smooth but too much handle deflection would be required for tight maneuvers. Therefore, the holes are "biased" slightly off the diameter line to improve neutral response while keeping adequate travel.
- Adding too much bias (about 10° or more) makes the system too sensitive at neutral and approximates the conventional system again.
Notice that the distance from the bellcrank center to the left spur is longer than the distance to the right spur. This unequal spacing compensates for the spurs' sideways motion as the bellcrank rotates (sideways motion subtracts from the pushing motion for up elevator while adding to the pulling motion for down elevator). Adjusting these distances allows equal up and down travels.
Mechanical considerations
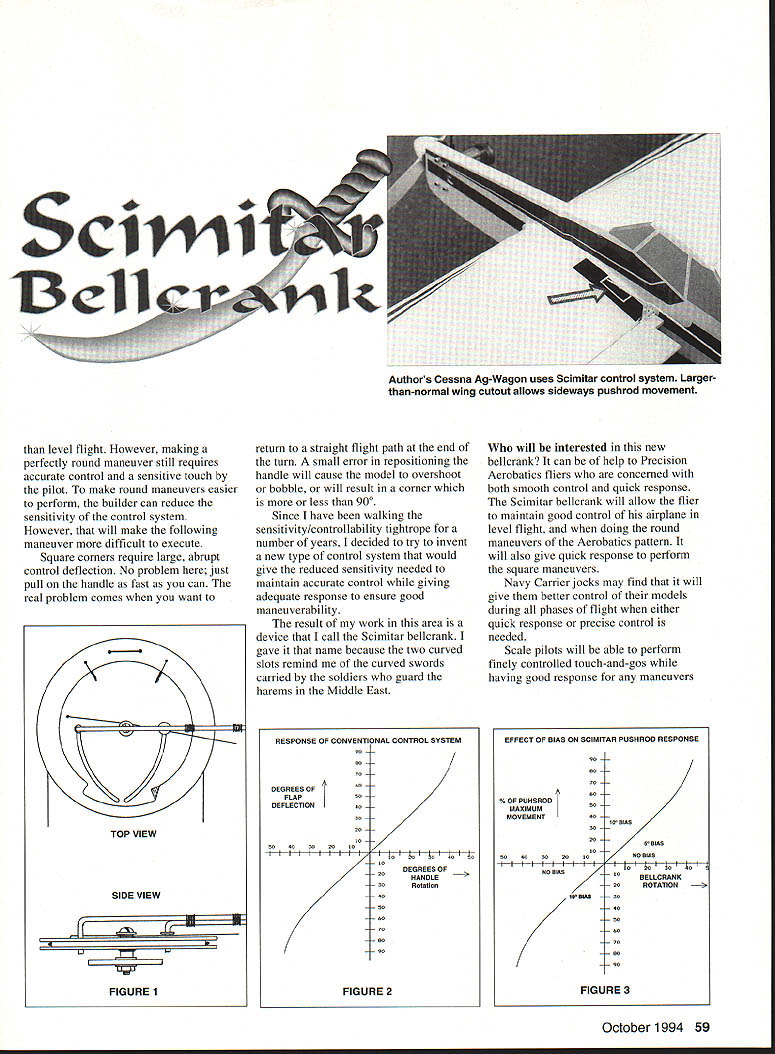
- A circular bellcrank is required to achieve the desired response curve, so flexible leadout wires must be used.
- There is little danger of the wires slipping off because the groove for the leadouts is 1/4 inch deep and line guides installed in the wing close to the bellcrank help keep the wires in position.
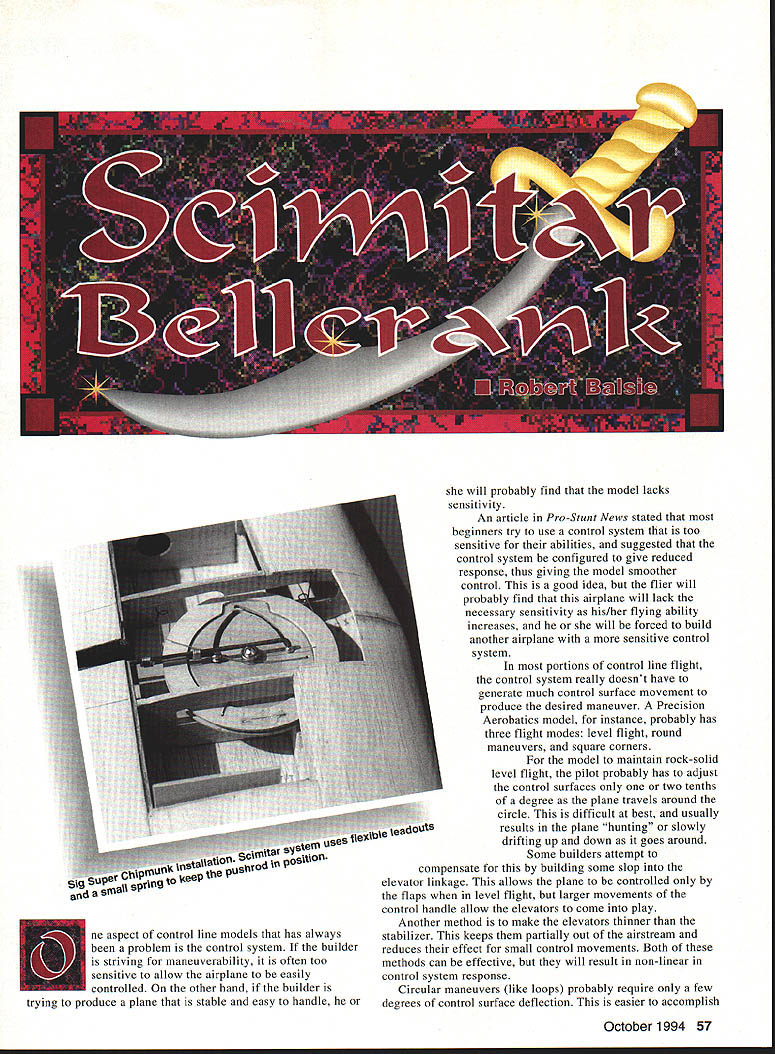
- The pushrod is free to move in its slots. Centrifugal force will likely hold it in place while flying, but on the ground the pushrod might move and jam unless prevented.
- A small "keeper" spring made of very thin wire is used to keep the pushrod in position at all times; its effect on control operation is negligible.
Control-line pilots know that tail‑heavy balance improves response but increases sensitivity. Because the Scimitar system has relatively slow response at neutral, it allows a model to be balanced tail‑heavy without causing normal controllability problems.
Who will be interested
- Precision aerobatics fliers concerned with both smooth control and quick response will find the Scimitar bellcrank useful: it allows good control in level flight and round aerobatic maneuvers while providing quick response for square maneuvers.
- Navy carrier pilots may gain better control during all phases of flight when either quick response or precise control is needed.
- Scale pilots will be able to perform finely controlled touch-and-gos while retaining good response for other maneuvers.
Construction and materials
All Scimitar bellcranks I have built were made of 1/8-inch aircraft plywood with rim pieces of 1/16-inch plywood. This construction is strong, easy to fabricate without special tools, and the finished device weighs about one ounce.
Plans, instructions, and software
If you would like to try making one of these systems, I have a detailed set of instructions and diagrams you can use to assemble and install one. I will mail a copy for $3.75 to cover photocopies, postage, etc. The instructions include a chart covering many sizes and applications.
If you would like to custom-design a system, I have written a computer program that runs under DOS BASIC to do so. The cost for a 3.5-inch diskette with the program is $3.50.
Write to: 325 Jennings Street Endicott, NY 13760-4018
Transcribed from original scans by AI. Minor OCR errors may remain.

